取り組み・成果

小口径配管内部の壁面状態を目視検査できるシステムを目指して
電磁振動を利用した複雑管内検査用アクチュエータシステムの開発
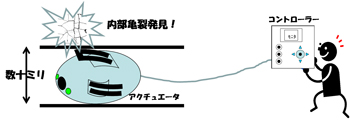
目指す「管内目視検査用アクチュエータシステム」のイメージ
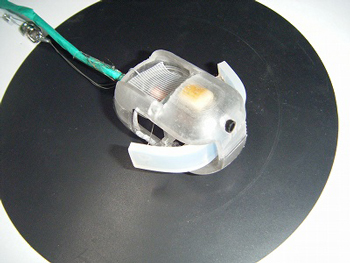
アクチュエータ(研究開発用試作品)

管内試験走行の様子
企業
有限会社豊洋電子精機(宮城県仙台市)
研究機関
東北学院大学工学部
研究開発実施期間
平成25年1月〜平成27年3月
研究概要
日常のメンテナンスあるいは災害時において、発電設備に用いられる配管、水道・ガスのパイプラインなど、管内部壁面の状態を調べるため簡便かつ迅速に直接観察できるツールが必要とされています。配管の内部検査を目的としたロボットの開発例が報告されていますが、小口径管に対応する小型化に課題を抱えています。この多くはモータ式のロボットであり、モータ自体はコンパクトでありながら、減速機やリンク機構などの付加的な機器が装置の大半を占めるため小型化の障壁となっています。
当該プロジェクトでは、簡便で安価な構造を持つ推進力のあるアクチュエータを用いて、管内部を上下・左右方向に自由な移動を実現し、複雑管内をスムースに移動できる走行性・操作性に優れた“管内目視検査用アクチュエータシステム”を目指しています。
期待される効果
東日本大震災では水道やガス・石油供給プラントに代表される多数の配管類などの生活基盤となるインフラが多くの地域で損傷しました。一部では修理・改修することで稼働が可能でしたが、損傷の程度が使用に耐えうる状態であるかの判断(検査)に時間を要しました。特に配管の内部損傷に関しては直接目視で判断できる外部損傷とは異なり、損傷状態の把握に多大な時間を要し、復旧の遅延に繋がっていました。当該システムは、これら災害用検査に加え、日々のメンテナンス手法としても威力を発揮します。同時に製品化により検査関連企業、部品製造企業など地域の関連企業と共に経済的効果をもたらし、復興に大きく貢献します。
これまでの研究開発成果
大学のシーズであるアクチュエータの動作原理に基づき、プロトタイプモデルを作製し、走行テストや配管内での異常停止時対処機構の導入など、目指す製品へ向けて研究開発中です。
マッチングプランナーの声
申請時には、アクチュエータ本体の推進特性向上、ケーブルの自動制御機構や配管内の異常停止時対処機構の開発、操作性に優れたコントロールなど解決すべき課題が多く、限られた研究期間と早期製品化の実現を考慮して、課題の絞り込みおよび目標設定を提案し、本プロジェクトの実施に至っています。また産学共同研究を始めて日が浅いので、プロジェクト開始当初から研究進捗報告会の頻度を多くして、メンバー間で情報共有を密にするよう努めています。
(担当マッチングプランナー 仙台事務所 磯江準一)