取り組み・成果

上り坂/下り坂、道路の段差/凸凹もなんのその
アシスト・制動制御付き足こぎ車椅子の開発研究
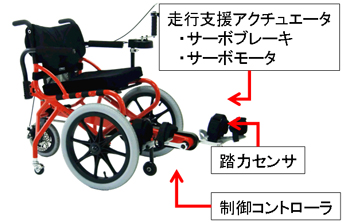
足こぎ車椅子の外観と必要なアシスト制動制御

制動制御機構を搭載した足こぎ車椅子の下り坂走行実験の様子
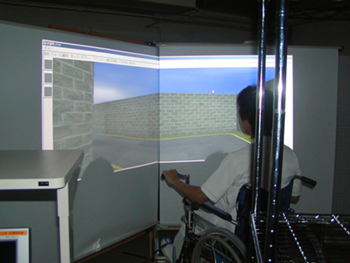
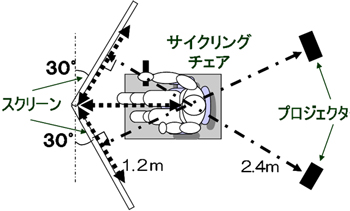
仮想環境における足こぎ車椅子リハビリ支援システム
企業
株式会社TESS(宮城県仙台市)
研究機関
東北大学工学研究科
東北大学サイバーサイエンスセンター
東北大学医学系研究科
研究開発実施期間
平成25年1月〜平成27年3月
研究概要
足こぎ車椅子は下肢を使っての運動が基本であるため、リハビリテーションだけではなく下肢運動機能障害が残ってしまった人の移動手段として非常に優れています。(株)TESSは平成21年に足こぎ車椅子Profhandを開発・製品化して、リハビリテーションや介護福祉の新しいツールとして市場を築きつつあります。しかしながら現製品は施設内の平坦スペースでの使用を前提としているために、施設外の実生活で遭遇する上り坂・下り坂や道路の段差、凸凹などがある屋外環境での使用(負荷増大やスピード安全性等)には必ずしも適した移動手段とはなっていません。
本開発プロジェクトでは、足こぎ車いすのリハビリテーション効果を変えることなく、東北大学のシーズを活用・発展させて、既存の足こぎ車いすに対して利用者の力をパワーアシストする機能や下り坂などにおいて走行抵抗(制動の強さ)を変更し重力補償する機能の開発を行うとともに、仮想環境下で足こぎ車椅子の操作トレーニングやリハビリ効果の検証を支援するシステムの開発を行います。
期待される効果
現在、歩行障害者の移動手段として手こぎ車椅子が主流ですが、最近は電動車椅子も普及が始まっています。しかしながら、運動をしないことから却って健康を損なうことが危惧されています。一方、施設におけるリハビリ用途に開発された足こぎ車椅子が本開発プロジェクトにより、障害者の普段の生活における優れた移動手段として使えるようになると、歩行障害者は、自力で運動することで健康を保ちながら健常者の歩行スピード並み以上で移動できる生活を送れるようになりQOLが大きく向上すると期待されます。現在、脳卒中による運動障害をはじめ歩行障害者は400万人に及ぶと推定されており、その社会的、経済的な効果はきわめて大きいと考えられます。
マッチングプランナーの声
相談を受けたときは仮想環境における現行足こぎ車椅子のリハビリ支援システムの開発がテーマでしたが、リハビリ施設におけるトレーニングツールとして開発・製品化した足こぎ車椅子Profhandの出荷4,000台の半数が実は個人購入者であるという販売データに着目し、実生活における移動手段として足こぎ車椅子を使いたいという歩行障害者の声にもっと応えられる足こぎ車椅子も開発するプロジェクトになりました。
(担当マッチングプランナー 仙台事務所 青山勉)