製造業に革新をもたらすスマートロボット技術の開発

| 重点公募テーマ | 「サイバー世界とフィジカル世界を結ぶモデリングとAI」 |
|---|---|
| 研究開発期間 | 2021年5月~2026年3月(探索研究 2018年11月~2021年4月) |
| グラント番号 | JPMJMI21B1 |
| 研究概要 | 研究概要 |
| 成果集 | 成果集 |
| 新技術説明会 | 新技術説明会(2024年度) 新技術説明会(2022年度)
|
近年、少子高齢化による人口減少が加速しており、中小企業庁によれば2025年には、120万以上の中小企業が廃業し、約650万人の雇用と約22兆円のGDPが失われる可能性があると言われています。この課題解決に向けて、情報通信技術の進歩による、IoT利活用、デジタルトランスフォーメーション(DX)注1)などが急速に進行しており、中小企業を含めた製造業全体でロボットの積極的な活用による工場の自動化が期待されています。
しかし、現在の産業用ロボットでは塗装、溶接、マテリアルハンドリング注2)などの定型作業の自動化にとどまっており、人手に頼っている組み立て、食品加工、縫製、研磨などの作業対象に合わせて力加減や柔軟動作を必要とする非定型作業の自動化には至っていません。その原因は、既存の力センサー、画像センサーでは検出精度や応答速度が人の持つ感覚取得能力には遠く及ばないことや、作業者が自然に身につける勘・コツといわれる暗黙知が明示化できず、ロボット動作に反映できないことにあります。この解決には、実空間(フィジカル空間)の作業感覚をデジタル化し、仮想空間(サイバー空間)での解析・予測などにより実空間に付加価値を与えるというサイクルを繰り返すことが鍵となります。
本研究開発課題では、力センサーを用いず位置情報を活用して人が持つ繊細な作業感覚をデータ化できるリアルハプティクス技術 注3)を核として、作業者の感覚や暗黙知をデジタル化するAI技術(適応的模倣学習)、多様な状況に適応するための高速シミュレーション技術(モデルブリッジ)との融合により、対象に応じて適切に力を加減しながら、さまざまな環境の変化にも適応して作業を行う革新的なスマートロボットを開発します。本格研究では、多種多様な材質や形状の布地を扱う縫製作業や重労働であるが繊細な力加減も求められる研磨作業にスマートロボットを適用し、これまでの製造業の自動化の限界が突破できることを示します。また、本技術はサービス分野、建築土木分野や農業分野など他分野への波及が見込まれ、製造業だけではなく日本の産業全体の人手不足の解消や国際競争力の強化が期待されます。
注1)デジタルトランスフォーメーション(DX)
企業がデータやデジタル技術を活用し、組織やビジネスモデルを変革し続け、価値提供の方法を抜本的に変えること。
注2)マテリアルハンドリング
製造に用いる材料、部品などの物品の移動、搬送、取り付け、取り出し、仕分けなどの作業およびこれに伴う作業のこと。
注3)リアルハプティクス技術
機械やロボットの力加減を自在に制御することができる、本研究開発課題の研究開発代表者である慶應義塾大学の大西公平特任教授が発明した力触覚伝送技術。
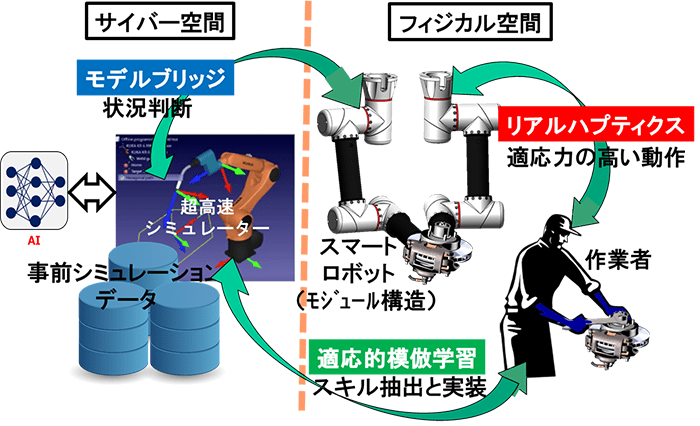
図 本研究が目指す新しいスマートロボット
研究開発実施体制
京都大学、国際電気通信基礎技術研究所、産業技術総合研究所、横浜国立大学、奈良先端科学技術大学院大学、日本電気株式会社
トピックス
-
2026年2月13日(金) 「超スマート社会の実現」領域 本格研究「製造業に革新をもたらすスマートロボット技術の開発」公開成果報告会(2026年2月20日 慶應義塾大学日吉キャンパスにてハイブリッド開催)
公開成果報告会のご案内
-
2021年6月21日(月) 「超スマート社会の実現」領域 本格研究「製造業に革新をもたらすスマートロボット技術の開発」キックオフシンポジウム(2021年7月2日ハイブリッド開催)(大西課題)
スマロボプロジェクトキックオフシンポジウムのご案内 -
2021年4月19日(月) 令和3年度新規本格研究課題が決定しました(大西課題)
「未来社会創造事業(探索加速型)における令和3年度新規本格研究課題の決定について」
JSTプレスリリース
※統合前の探索研究課題
「ロボットモデルと実環境のGANによる接続と部品組立動作生成」(森本 淳)・「機械学習による超高速シミュレーション最適化技術の開発」(山崎 啓介)・「自己研鑽型物理エージェントの実現」(大西 公平)
|
所属・職名は、研究者がresearchmapに登録した情報をそのまま表示しています。(詳細はこちら) researchmapの登録状況により、情報が最新ではない、あるいは空白に見える場合があります。 また、インターネット接続がない状態では表示されません。 |