高速ビジョンによる多次元デジタルツイン計測と再構築

| 重点公募テーマ | 「Human centric デジタルツイン構築による新サービスの創出」 |
|---|---|
| 研究開発期間 | 2024年4月~(探索研究 2021年10月~2024年3月) |
| グラント番号 | JPMJMI24H1 |
| 研究概要 | 研究概要 |
従来のメタバースやデジタルツインなどの情報環境では、映像情報処理が人間の認知レベルである1秒間あたり30~60フレーム(30~60fps)程度の性能で実装されていたため、実世界との時空間的なずれを生み、応用上の様々な問題を引き起こしていました。具体的には、デバイス装着による拘束的状況、リモート会議の映像遅延、遠隔手術や自動運転の入出力の遅延、VR酔いなどの問題が快適な情報環境構築の大きな阻害要因となっています。本提案では、1000fpsという世界でも類をみない超高速ビジョン技術を用いて、実物体と情報世界との間の速度と精度に差のない、多次元デジタルツインの技術群を開発することを目的とします。
しかし、人間の感覚を遥かに超える時間・空間密度で実物体の多次元情報を計測し、人やロボットなどが理解・利用可能な形で再構成するには、物体センシングからディスプレイまでの様々な技術を超高速ビジョン技術と同等の性能水準を満たすよう開発し、連携させる必要があります。このため探索研究では高速ビジョンのための計測・画像処理をはじめ、駆動光学系の整備、運動計測に基づく形状情報のデータ統合、ビジョンによるロボットの制御技術などを開発・統合することで、高速、低遅延、高解像度の3次元形状・色情報計測や高速ダイナミックプロジェクションマッピング(DPM)などを実現しました。
本格研究では探索研究の成果を活かし、高速性を維持した上でさらなる高解像度化や豊かな情報表現を目指します。その際、通信や処理において単位時間に扱える情報量、即ちデータレートが実装上制限されるため、時間と空間の双方を同時に高速・高分解能で切り取ることは容易ではありません。また、通信・演算デバイスと比較して入出力デバイスの高速化は遅れており、システム全体の遅延を抑える上でのボトルネックとなっています。
これらの課題に対して、本格研究では高速センシングで時間軸を完全に把握した上で、時間を基軸として得られたデータを統合することで、実物体を代替するリアリティーを持った高解像度のデータ取得技術の実現を図ります。併せて、遅延時間が数ms以下の入出力デバイスや投射型ディスプレイ、高速ロボットとの連携技術などの研究を進めます。これらによって、超高速で動く物体の形状の精密計測など、時間軸を加えた多次元情報を超高速に計測・処理し、人間が理解・利用しやすい形での表示が実現することで、実世界と情報世界を時間的・空間的にずれなくつなぐことが可能となります。本研究成果は多次元デジタルツインをリアルタイムで扱う技術基盤として、多様な領域の応用に展開され、従来のパラダイムを超えたサービス・ビジネスの創出につながることが期待されます。具体的には、室内・自動車等における実世界インタラクション(AR・VR、e-コマース、製品設計、映像・メディア等)、顕微鏡像・望遠鏡像等の制御・認識(生命科学、スポーツ、セキュリティー等)、高速知能ロボット(無停止製造ライン、高速AI認識・検査等)など、広範な分野が想定されます。
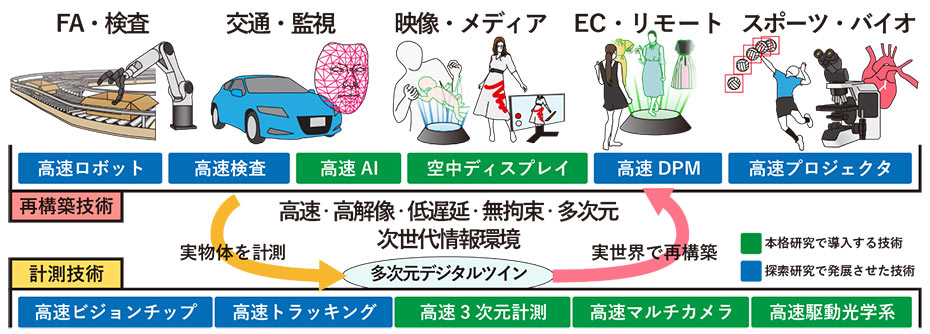
図 多次元デジタルツイン技術の多様な領域への適用
研究開発実施体制
〈代表者グループ〉
東京理科大学 総合研究院
〈共同研究グループ〉
広島大学、宇都宮大学、群馬大学、東京科学大学
トピックス
-
2025年9月24日 (水) 本格研究 宮下課題「高速ビジョンによる多次元デジタルツイン計測と再構築」
オンラインセミナー(2025年10月21日 オンラインにて開催)
オンラインセミナーのご案内
-
2024年11月5日(火) 本格研究 宮下課題「高速ビジョンによる多次元デジタルツイン計測と再構築」
キックオフシンポジウム(2024年12月2日 東京理科大学 森戸記念館にて開催)
キックオフシンポジウムのご案内
※探索研究期間中の研究開発代表者
石川正俊 学長/教授(東京理科大学)
|
所属・職名は、研究者がresearchmapに登録した情報をそのまま表示しています。(詳細はこちら) researchmapの登録状況により、情報が最新ではない、あるいは空白に見える場合があります。 また、インターネット接続がない状態では表示されません。 |