[本文]
![]()
日米研究者による震災救助活動

日米「水中での探査救助作業を行う凧型遠隔操作潜水ロボットの開発」
(支援期間:平成21〜23年度)

日本側研究代表者:広瀬 茂男 東京工業大学 教授
米国側研究代表者:Daniela Rus マサチューセッツ工科大学 教授

日米「災害対応ロボティクス分野における日米国際研究交流」
(支援期間:平成21〜23年度)

日本側研究代表者:田所 諭 国際レスキューシステム研究機構 会長
米国側研究代表者:Robin Murphy テキサスA&M大学 教授

戦略的国際科学技術協力推進事業の日本−アメリカ研究交流事業において、研究交流を行っている日米両国の研究者からなる合同チームが、ロボットを活用した震災地での緊急救援活動を行いました。
特定非営利活動法人国際レスキューシステム研究機構(IRS)の田所諭 会長(東北大学教授)とアメリカ側研究代表者であるテキサスA&M大学のRobin Murphy教授、また、同じく日本−アメリカ研究交流事業において別の研究課題の研究代表者である国立大学法人東京工業大学 広瀬茂男教授など、日米のロボット研究者からなる合同チームは、共同開発した水中での探査救助作業用ロボット「Anchor Diver Ⅲ」をはじめ、複数のロボットを用いて東日本大震災の被災地沿岸部にて、行方不明者捜索活動等を行いました。
4月19日(火)から23日(土)までの4日間、南三陸町の佐藤仁町長と岩手県災害対策本部からの要請を受け、宮城県南三陸町と岩手県陸前高田市の沿岸部を中心に行方不明者の探索および湾内にて船舶の航路が確保できるかどうかの調査活動を行いました。
活動には、広瀬教授が開発した水中探査救助作業用ロボット「Anchor Diver Ⅲ」とRobin Murphy 教授による水中の車両やパイプ内の調査が可能な「Seamor-ROV」,「Seabotix SARbot」の3機種(計4種類)を用いました。

水中での探査救助作業用ロボット「Anchor Diver Ⅲ」

水中の車両やパイプ内の調査が可能な「Seamor-ROV」
「Anchor Diver Ⅲ」を岸壁から水中に入れ、Anchor Diver Ⅲに取り付けられたカメラや音波探知機から、がれきなどの位置を確認しました。「Anchor Diver Ⅲ」はソナーやカメラを搭載しており、ダイバーが潜ると危険がある漂流物の下などを探索しました。総計数100平米程度(最大深度4m程度)の領域において、ソナーに映る対象に近づいて、ハイビジョンカメラで確認する探索作業を実施しました。水の透明度は悪かったが接近して見ることができるため、水中の対象物は十分に確認することができました。遺体発見には至りませんでしたが、海中に沈んだ車を発見し、車内に人がいないかどうかを調べることができました。また、水中ではいかりやロープなどはありましたが、港の復旧の妨げになるような特段大きな障害物は意外にも見当たらないことを明かにしました。

Anchor Diver Ⅲを用いた岸壁からの捜索の様子
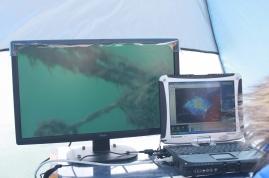
Anchor Diver Ⅲから送られてきた水中の様子
「Anchor Diver Ⅲ」はワイヤを張る方式であるため、安定して対象物を確認することができました。有線方式のROV (Remote Operated Vehicle)でしたが、電線による海底がれきへの絡みつきは発生せず、操作性も良いことが判明しました。
「また、田所会長らがNEDOの支援を受けて開発した「Quince」というロボットは、全長約70センチ、幅約50センチ、不整地を半自律走破可能なロボットであり、遠隔操作が可能なため、放射線量の高い原発内でも作業を行うことが可能です。本ロボットは、戦略国際科学技術協力推進事業の支援を受け、アメリカテキサス州にあるDisaster City(災害現場を再現した大規模な施設)にて、コンクリートや木材がれきを踏破できることが確認されており、今後、原発など現場への利用が期待されています。

不整地を自律走破可能なロボット「Quince」