
Technology theme: Quantum inertial sensor technologies leading to innovative high precision and downsizing of self-localization units
Self-localization has been used to assist in the automatic and autonomous positioning of things and humans; examples exist in various services, such as global navigation satellite systems (GNSS), autopilot systems for airplanes, and the information on surroundings provided by mobile devices. Further, its utilization has been rapidly expanded to provide services to people in society. However, GNSS relies on radio waves to operate; as a result, in certain situations, such as underground, in buildings, or at sea, where radio waves cannot reach, inertial sensors that can accurately measure the angular velocity of a moving object to estimate where it is and in what direction it is moving are an effective replacement or supplement. Furthermore, the creation of a high-precision inertial sensor would have a wide range of applications; for example, as a position control for satellites and robots. In recent years, research into inertial sensors that feature quantum effects has been making progress in regard to the innovative improvement of the accuracy of self-localization as well as downsizing, and this is expected to lead to the creation of high-precision inertial sensors in the future.
Development of high-performance gyroscopes with matter waves

| R&D Period | 2017.11-2024.3 |
|---|---|
| Grant Number | JPMJMI17A3 |
| Project Summary | Summary |
Summary:
Vehicle position can be estimated by using both accelerometers and gyroscopes. Such estimation on the self-position is called the inertial navigation which enables supplementing the Global Positioning System(GPS) or Quasi-Zenith Satellite System (QZSS) vulnerable to radio disturbance. Proof-of-concept (POC) of this project is to implement high-performance of inertial navigation system applicable to a selfdriving car, an autonomous ship, and also seabed resource exploration.
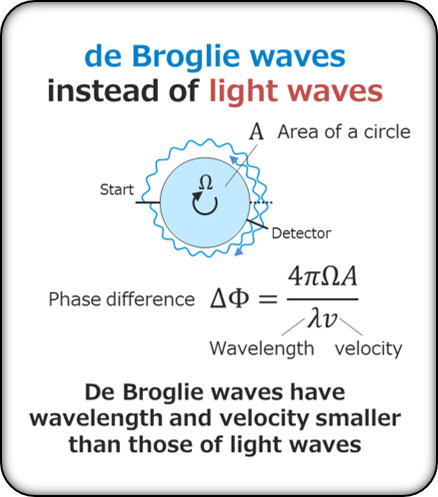
Currently, the accuracy of the inertial navigation is restricted by the Allan variance of a gyroscope. In this project, the performance of gyroscope that can be mounted on various vehicles is drastically improved by using quantum de Broglie wave instead of the classical light wave.
R&D Team
[Leading Institution]
Tokyo Institute of Technology
[Collaborators]
Osaka University, Japan Aviation Electronics Industry, Limited
Project Website
http://www.mirai.qnav.iir.titech.ac.jp/en/index.html
|
Affiliation and job title should automatically appear from the information that a researcher registered with researchmap.
Data may be outdated or undocumented. When there is not a connection via the internet, data are not displayed. |