成果概要
気象制御のための制御容易性・被害低減効果の定量化[2] データ駆動型気象予測手法の開発
2024年度までの進捗状況
1. 概要
2024年度中においては、データ駆動型の領域気象予測モデルのプロトタイプ開発と初期結果の評価を行いました。画像認識AIとして用いられるVision TransformerやAR2U-Netをアーキテクチャとして採用し、日本周辺領域の大気再解析データを用いてモデルを構築しました。その結果、いくつかの豪雨事例において、構築したモデルによる予測結果は、データ駆動型の気象予測モデルの課題として知られている雨量の過小な予測の改善が見られました。
また、自身らが開発したモデルと他機関によって公開済のモデルについて、訓練手法や初期値設定について比較および検証を行いました。その結果、モデルの初期化方法の違いが性能に与える影響や、入力の摂動に対する予測結果の違い等について重要な知見を得ることができました。
2. これまでの主な成果
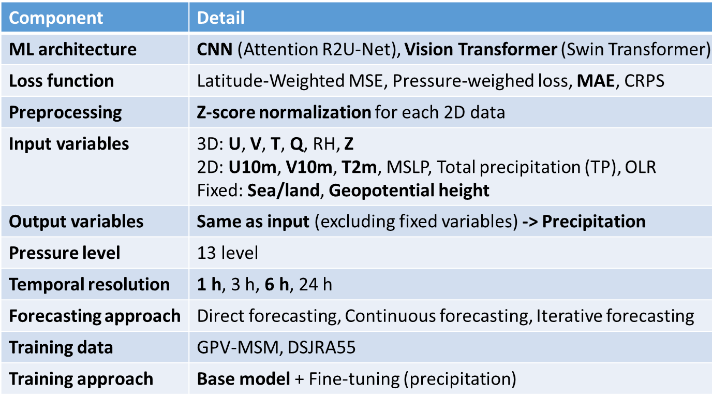
前年度に実施した気象予測モデルの調査結果をもとに、日本周辺の気象予測に特化した深層学習モデルの構成を検討し、5つのプロトタイプを開発しました。使用したアーキテクチャは、Vision Transformerの一種であるSwin-Unetと、CNNの一種であるAR2U-Netです。いずれのモデルも、20年分の領域再解析データ(RCDSJRA-55)を用いて学習を行い、気圧面ごとの風、温度、湿度、ジオポテンシャル高度、地上風、降水量などを入力変数としました。予測は、次時刻の値を出力し、それを次の入力とする自己回帰型としました。
最も高精度だったのはSwin-Unetを用いたモデルで、将来値を出力するPredictorと、拡散モデルによって結果を補正するCorrectorで構成されます。Correctorでは、予測値にガウスノイズを加えてから拡散過程でノイズを除去し、高周波成分を復元することで、予測結果の空間的な平滑化を軽減しました。2019年10月25日の豪雨事例では、1時間雨量の最大値が観測では83.5 mmであったのに対し、Predictor単体での予測は55.6 mm、Corrector併用では63.1 mmと改善が見られました(図1)。
また、自身らが開発したClimax改良版の予測モデルについて、訓練方法や初期値設定の影響について検証するとともに公開済みのデータ駆動型モデルとの比較を行いました(図2)。その結果、初期値設定の影響が大きいことや、予測精度向上における自己回帰生成の限界等が明らかになりました。

3. 今後の展開
2024年度までに開発したモデルは、単一の初期値をもとに単一の予測結果を出力する、いわゆる決定論的な予測モデルです。今後、Correctorとして用いた拡散モデルにおいて複数のガウスノイズを与えたり、AR2U-Netにおける潜在変数に確率分布を与えたりすることで、大規模アンサンブルを生成可能な確率論的予測モデルへと発展させる予定です。
また、今年度のモデル間の比較・検証により、モデルの初期化や入力摂動の与え方の違いが予測結果に与える影響や傾向を把握することができました。これらを明示的にモデルの学習に取り込むことで、予測精度や信頼性の向上に結び付けるための研究開発を実施します。