- JST トップ
- /
- 戦略的創造研究推進事業
- /
 さきがけ
さきがけ- /
- 取組・成果/
- 領域活動紹介/
- [領域活動紹介] 人とインタラクションの未来/
- 研究者紹介 [2期生]
研究者紹介 [2期生]
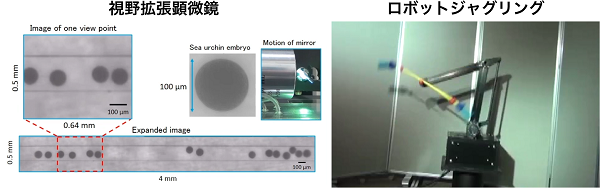
青山 忠義
青山 忠義
画像センシングとそのマイクロ・ナノメカトロニクス/ロボティクスへの応用
主に高速ビジョンを用いた画像センシングとそのマイクロ・ナノメカトロニクスやロボティクスへの応用に関する研究を行っています。人間の目では捉えられない現象を計測する技術を基盤とし、人が不可能(困難)であるタスクを実現するシステムの開発を目指しています。
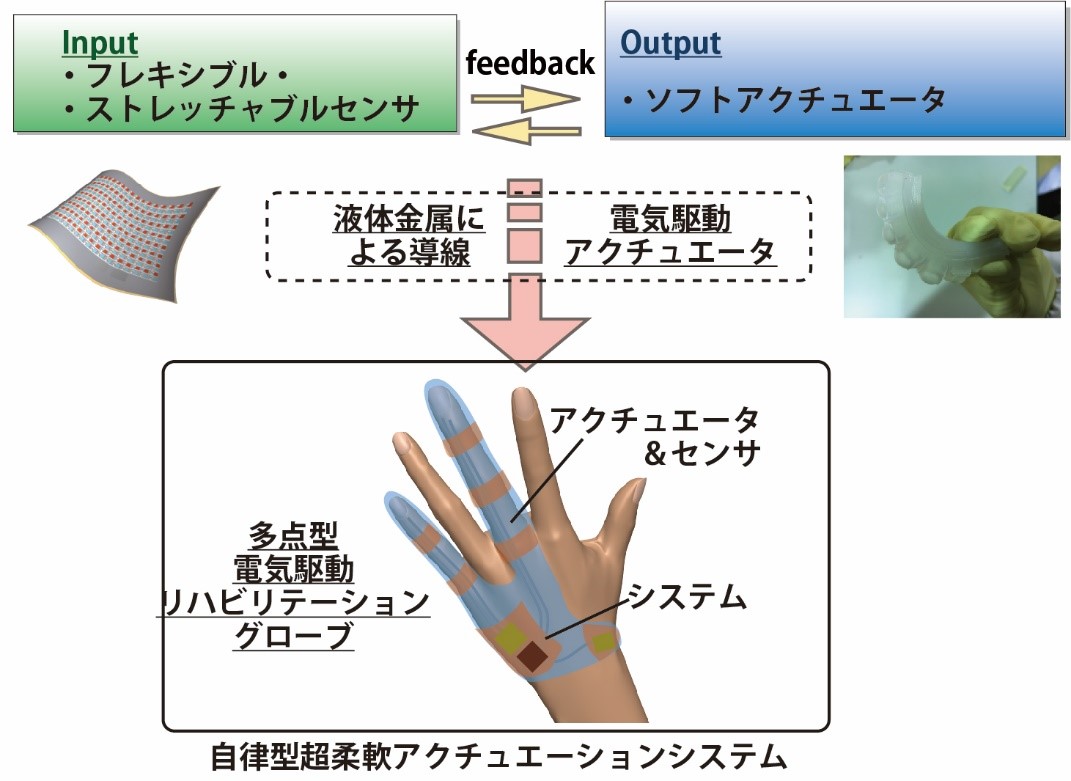
太田 裕貴
双方向ソフトデバイスによる機械システム制御を用いた柔軟アクチュエーションシステムの開発
本研究はソフトセンサ・ソフトアクチュエーターからなる機械システム制御をもとに多点動作制御できるソフトアクチュエーションシステムを開発します。ソフトアクチュエーターは、リハビリなどの用途に使用が期待されている一方で、制御が困難であること、ポンプを含めシステム全体が重こと、有線である必要があるという欠点を有しています。本研究ではソフト機械システム制御によって新たな人-機械のインタラクションを提案します。
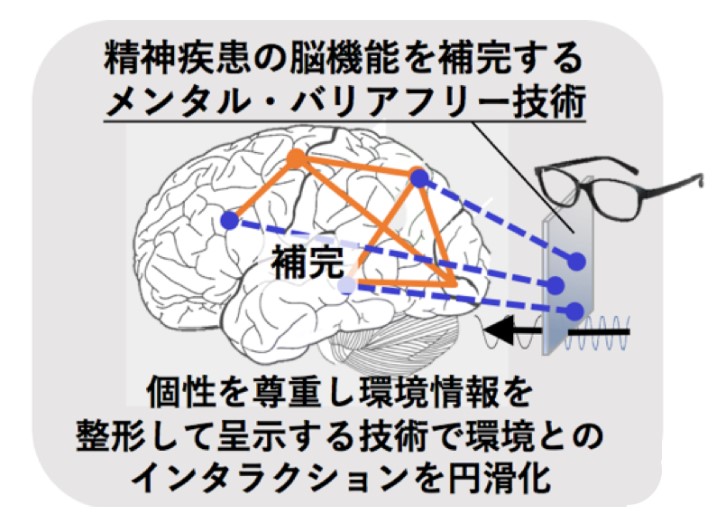
小泉 愛
精神疾患患者と実世界環境のインタラクションを円滑化するメンタル・バリアフリー支援技術開発
精神疾患患者の病理脳を補うように環境情報をアクティブに整形するフィルタリング技術を開発し、患者の個性を守りながら症状を軽減させ、患者と実世界環境のインタラクションの円滑化を支援することを目指します。PTSDと統合失調症を対象に、脳科学的研究を通して各疾患における脳機能の病態を明らかにし、病態に応じて環境情報を整形して症状を緩和するメンタル・バリアフリー技術を開発します。
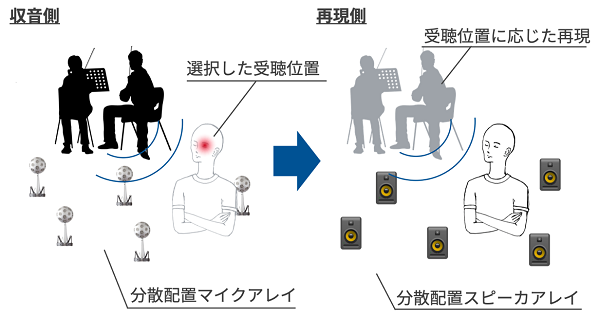
小山 翔一
分散配置アレイによる音空間の記録・再生技術基盤の構築
広い領域の音空間を忠実に記録・再生することは,聴覚におけるバーチャルリアリティを実現する上での究極的な目標である。音場収音・再現技術は,多数のマイクロフォン・スピーカを用いた音場の再構成を目的とし,従来は音場の境界値積分表現のような物理方程式に基づく手法が提案されてきた。このような従来技術では,マイクロフォン・スピーカ素子を単純なアレイ形状で配置する必要がある上,高い周波数帯域までの再現精度を保つためには多くの素子数を必要とする。本研究では,アレイ素子を任意の位置に配置可能な音場収音・再現技術について検討を行う。このような技術が実現されれば,システムの大規模化・高コスト化を避け,より柔軟なシステム構成を用いて広い範囲のアプリケーションに適用可能になると期待できる。
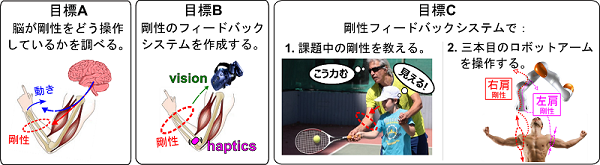
高木 敦士
剛性フィードバックでの運動のトランスファーと向上
腕の剛性は外部の力からの影響を阻止する筋肉の仕組みであって、力が必要な課題(e.g.木彫り)には不可欠な要素である。動作と違って剛性は見えないがため、自分がどう力んでいるかは把握しにくい。相手に正しい剛性を教えるのも困難である。本研究では、剛性フィードバックとそれを応用したインターフェースを開発し、運動の向上やトランスファーを目指す。
武見 充晃
記憶を増強する脳状態操作技術の確立
本研究の目標は、ヒトの記憶を増強できる、非侵襲的な脳状態操作技術の確立です。記憶は、形成された脳状態と近いほど想起しやすいことが示唆されているため、操作的に作り出した多様な脳状態下での課題学習は、身につけた技能・知識の安定的・持続的な発揮を可能にすると考えられます。同じ量の練習をしたとしても、効率的に新しい技能・知識が身につく、「スマート学習」の実現に資する基盤技術を創出します。

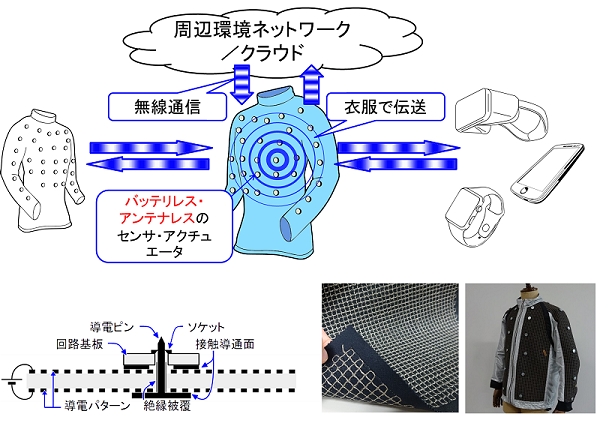
野田 聡人
身体表面分散型エレクトロニクス
センサやアクチュエータなどを多数衣服に埋め込むウェアラブルシステムの構築のために、無配線でこれらの素子を簡単にネットワーク化して外部環境のネットワークや周辺機器と相互に連携するための基盤技術を開発しています。人と環境のインタラクションにおいて、人の状態の計測および人の全身の触覚を含む感覚器官へのフィードバックのための標準的ハードウェアを確立し、インタラクション研究の生産性を向上することを目指しています。
森勢 将雅
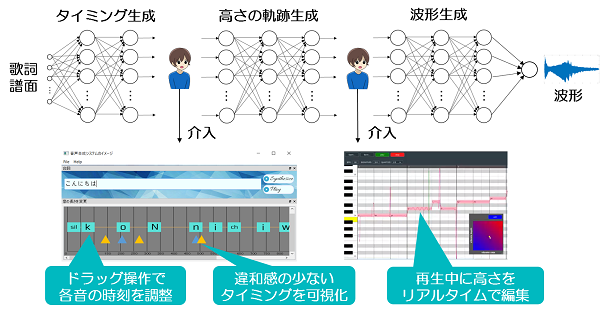
機械学習を活用した歌唱デザイン支援の研究
クリエイタによる職人芸的な微調整でなされる高度な歌唱デザインを対象に、機械学習を活用して作業効率を改善し作業ストレスも緩和できる基盤技術とインタフェース開発を実現します。本インタフェースの特色は、機械学習による歌声生成過程に人間が介入し、結果を機械学習により調整する機能にあります。介入においても、楽曲の再生中に歌声を操作する実時間制御や自然に聴こえるタイミングを可視化する機能などによる省力化を目指します。
門内 靖明
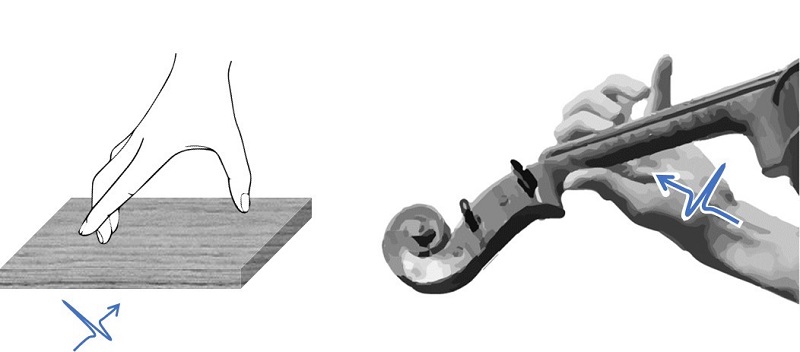
透過型触刺激法の確立と認識行動支援への応用
人と物とが接近・接触する際の認識や行動を支援するための透過型触刺激法を実現します。具体的には、木、布、プラスチックといった身の回りの非金属媒質越しに電磁的に触刺激を提示する方法を確立し、その表面に近づいたり触れたりする際の触感を上書きします。生体に対する安全性の検証を重ねながら、手触りのカスタマイズ、ロボットの接近感や存在感の提示、演奏やスポーツ動作の身体的チュートリアルなどの応用を目指します。
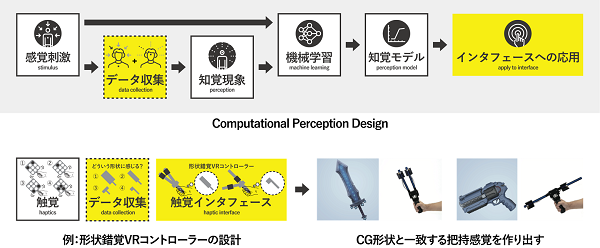
吉田 成朗
錯覚や多感覚統合を含む知覚特性を考慮したインタフェース設計に関する研究
心理学とインタフェース設計をつなぐ工学的技術として、Computational Perception Designという領域を提案しています。錯覚や多感覚統合などを含む人間の多様な感覚に対して、目的とする知覚現象とそれを生起する感覚刺激の関係を収集し、機械学習に代表されるデータ駆動手法によって知覚現象をモデル化することで、人間の心理的なメカニズムを活用したインタフェースの構築に役立てます。