- JST トップ
- /
- 戦略的創造研究推進事業
- /
 ERATO
ERATO- /
- 研究領域の紹介/
- 終了領域/
- 川原万有情報網プロジェクト
川原万有情報網プロジェクト

研究総括 川原 圭博
(東京大学 大学院工学系研究科 教授)
研究期間:2015年10月~2022年3月
※本プロジェクトは、新型コロナウイルス感染症に伴う研究遅延対応策として、2022年3月まで研究期間を延長しました。
グラント番号:JPMJER1501
モノのインターネット(IoT)と、それを通じて得られるビッグデータが、社会の様々なシーンにおいて革命を起こすと言われている。しかし、人がインタラクティブに利用することを念頭に設計されたコンピュータは、過酷な自然や環境の中において自律的に振る舞う「モノ」としてはあまりに繊細で非力である。 本プロジェクトでは、人工物があらゆる環境に溶け込み、実世界に働きかけ、人間と自立共生しながら新しい価値を生む世界を実現するような、次世代のIoTのあり方を求めるべく、「万有情報網(Universal Information Network)」の構築を目指す。センサーネットワークやIoT機器がより自律的で能動的な人工物として作用し、自然物と共生して新しい価値を生むために必要な各研究領域(エネルギー、アクチュエーション、ファブリケーション)の技術開発、および、これらの技術を通した人工物・人間・環境の新たなインタラクションに関する研究の垂直統合的な推進により、環境と調和しながら、私たちの生活をより豊かにし、イノベーティブで新たな産業を生み出す基盤の創成を目指す。

研究グループ
・インタラクティブマター&ファブリケーショングル-プ
・無線電力プラットフォームグル-プ
・実世界システムグループ
・アプリケーションデザイングループ
研究成果
プロジェクトは、情報学、電気電子工学、ロボット工学、そしてアート・デザインという領域横断的な研究グループにより進められた。「自律共生的な道具」の実現をビジョンと定め、ビジョン実現のために不可欠な要素技術の研究開発をミッションとして取り組んだ。各領域において定めた研究目標とその成果を概観する。
エネルギー
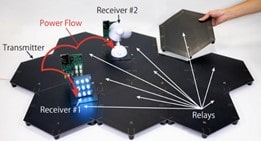
人工物があらゆる環境で動作するための、有線での給電や重いバッテリーを必要としない無線給電技術の開発」を目標とした。 具体的には、①難易度の高いアンテナ設計の支援や自動化など、誰でも容易に無線給電を使えるようにする「誰でも無線給電」、②部屋の中のほぼすべての場所への無線給電など、給電可能な空間領域を拡張する「どこでも無線給電」、③人体や他の電子機器への影響を防ぐための「安全な無線給電」の研究に取り組んだ。 取り組みの中で、これまで困難とされてきた、床や壁などの2次元平面や布などの柔らかい素材で製造される衣服・鞄などへ、無線給電の専門家に頼ることなくユーザ自身で無線給電機能を組み込むための技術として、切り取り可能な「ワイヤレス充電シート」や、給電領域を自由に構成可能な2次元無線給電システム「Alvus(アルウス)」を開発した。また、部屋スケールの3次元空間内のどこでもワイヤレスでの給電を可能にする技術「マルチモードQSCR(部屋中どこでもワイヤレス充電)」の開発にも成功した。

(左)切り取り可能なワイヤレス充電シート (右)Alvus (アルウス:給電領域を自由に構成可能な2次元無線給電システム)
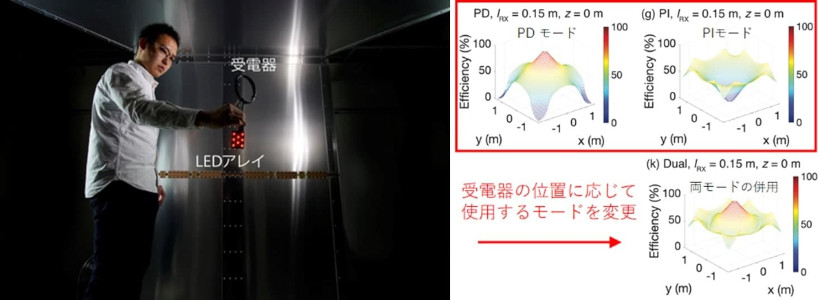
(左)マルチモード QSCRの内部 (駆動中のためLEDアレイが点灯) (右)マルチモード QSCRを用いた場合の電力伝送効率のグラフ
それぞれの無線給電テーマは、基礎研究のフェーズから応用研究への転換期を迎えており、今後は社会実装へ向けて研究をさらに加速させていきたいと考えている。現時点での具体的な実装テーマとしては、パーソナルモビリティへの無線給電の研究に取り組んでいる。
- ワイヤレス充電シート: R.Takahashi,T.Sasatani,F.Okuya,Y.Narusue,and Y.Kawahara,”A Cuttable Wireless Power Transfer Sheet, “Proc.of the ACM on Interactive, Mobile,Wearable and Ubiquitous Technologies(ACM IMWUT),vol.2,no.4,Article no.190,Dec.2018,doi:10.1145/3287068
- Alvus:K.Sumiya,T.Sasatani,Y.Nishizawa,K.Tsushio,Y.Kawahara,”Alvus:A Reconfigurable 2-D Wireless Charging System,”ACM on Interactive, Mobile, Wearable and Ubiquitous Technologies(ACMIMWUT), Vol3,Issue 2,No.68,pp.1-29,Jun.2019,doi: 10.1145/3332533
- マルチモードOSCR: T.Sasatani,M.J.Chabalko,Y.Kawahara, and A.P.Sample,”Multimode Quasistatic Cavity Resonators for Wireless Power Transfer,”IEEE Antennas and Wireless Propagation Letters, vol.16, pp.2746-2749, Aug.2017,doi:10.1109/LAWP.2017.2744658 T.sasatani,A.P.Sample, and Y.Kawahara, “Room-scale magnetoquasistatic wireless powertransfer using a cavity-based multimode resoner, “Nature Electronics, Vol.4, Issue 9, pp.689-697, Aug.2021, doi:10.1038/s41928-021-00636-3
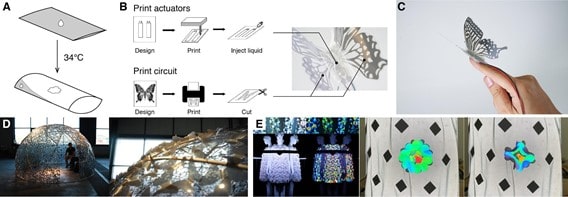
Liquid Pouch Motors. (A) 動作原理, (B, C) 印刷できるアクチュエータと回路を使った自律的なロボットの例, (D) 建築壁材への応用展示”Papilion”, (E) 形状が変化する服への応用展示”A LIVE UN LIVE
アクチュエーション
人工物があらゆる環境で実世界に働きかけるための、人間に寄り添い、環境と調和した、やわらかいアクチュエーション技術の開発」を目標とした。具体的には、①人間と人工物が相互にやりとりを行う「インタラクション」、②多様な環境に適合し、環境に負荷をかけずに分散するための「ロコモーション」、③ウェアラブルデバイスやモビリティなど、人間の周辺で動作するアクチュエータのための「安全性」の研究に取り組んだ。
「インタラクション」の取り組みでは、紙のように薄く軽くて柔軟でありながら、34℃以上の熱を加えることにより、自重の1000倍以上の負荷を約30%牽引できるアクチュエータである、「Liquid Pouch Motors」の開発に成功した。
現在、ロボットを駆動させるモータの小型化・軽量化の課題として、電気モータは硬くて重くかさばる点、空気圧を利用した平面アクチュエータ(パウチモータ)はパウチへの空気の出し入れ用チューブにより体積が増大するという点があったが、本モータは、外部熱によるパウチ内の微量の液体の相転移によって駆動するため、長いチューブなどを必要とせず、薄く軽く柔軟という点で従来のモーターがもつ課題をクリアすることができた。また、実際に銀ナノインクを用いた薄くて軽い紙ロボットなどの作製にも成功した。
アクチュエーション領域全体としては、今後は、これまで開発してきたアクチュエーション技術を、変形や移動のための動力源としてより融合的な研究に活用していきたいと考えている。具体的には、無線給電技術を使った自立型ロボットの実現、デジタルファブリケーション技術を使ったより自由な素材・構造の設計、カスタムICを使ったロボットのさらなる小型化などである。また、パーソナルモビリティなどの例で社会実装に向けた実証実験の実施を目指している。
- Liquid Pouch Motors: K. Nakahara, K. Narumi, R. Niiyama, Y. Kawahara, “Electric phase-change actuator with inkjet printed flexible circuit for printable and integrated robot prototyping, “Proc. of IEEE International Conference on Robotics and Automation (ICRA), pp. 1856-1863, May. 2017, doi: 10.1109/ICRA.2017.7989217
ファブリケーション
人工物があらゆる人間の理想や環境に溶け込み、多様な形状・素材の中に機能を内包させるための、サステナブルなファブリケーション技術の開発」を目標とした。具体的には、①現実世界の物体のファブリケーションを、ディスプレイのように高速で実現しようとする即興性、②その場にある材料からつくるなど、人や環境に適応するための適合性、③使い終わったら素材に戻して再設計・再造形できる循環性の研究に取り組んだ。 特筆する成果として、現在の3Dプリンタの立体造形より高速かつ低コスト(「即興的」)で立体構造の製作が可能で、マテリアルが「循環性」を持つようなデジタルファブリケーション技術を開発した。具体的には、加熱した樹脂に動的な型を押し当て造形する「ProtoMold(可変形状の型を用いた真空成形による高速プロトタイピング)」と、レーザカッターの利用とプラスチック膜に空気を注入して立体化させるブロー成形を組み合わせ造形する「BlowFab(レーザー加工を用いたブロー成形による高速プロトタイピング)」、磁石が埋め込まれた9mmサイズのブロックの組立てにより、任意の3次元形状を素早く造形できるデジタルファブリケーションツール「Dynablock(磁性ブロックの押出しと接合による高速プロトタイピング) 」の3つが生まれた。


 (左)DybaBlockを利用して作製したプロトタイプ
(中央)BlowFabを利用して作製したプロトタイプ
(右)ProtoMoldを利用してプロトタイプを作製する様子
(左)DybaBlockを利用して作製したプロトタイプ
(中央)BlowFabを利用して作製したプロトタイプ
(右)ProtoMoldを利用してプロトタイプを作製する様子
いずれも直径50mmの造形物の出力時において5~10秒の造形時間を実現し、既存の3Dプリンティング技術(CLIP:液体樹脂のプール内でオブジェクトを固形化、WirePrint:メッシュ構造の利用、Polyjet:UV硬化性の液体樹脂を用いたインクジェットプリント、SLS:粉末焼結積層造形法、SLA:光造形法)と比較して、造形時間の大幅な短縮を達成した。さらに、他の研究では実現が難しかった材料を再利用した再成形など、サステナブルな造形を実現した。また、現在の真空成形、ブロー成形は金型が必要だが、「ProtoMold」「BlowFab」は金型を必要としないため初期コストと時間が節約できる点も利点として大きい。 これにより任意の3次元形状を出力し、高速かつ低コストでマテリアルが「循環性」を持つことによって、「やり直し可能な技術」として、ファブリケーション領域のミッションに貢献した。今後は、ものづくりにおけるプロトタイプ作製やデザイン支援への応用を検討している。一方で、解像度が未だ低い点や強度を高めるなど、表現の制約をクリアする必要がある。さらに印刷物への回路の内蔵など、機能を持ったプロダクトの試作方法を進め、ソフトアクチュエータなど他のプロジェクトへの応用展開も進めていく。
- ProtoMold: J. Yamaoka, Y. Kakehi, “ProtoMold: An Interactive Vacuum Forming System for Rapid Prototyping,” CHI ‘17 Proceedings of the 2017 CHI Conference on Human Factors in Computing Systems, pp. 2106-2115, May. 2017, doi:10.1145/3025453.3025498
- BlowFab: J. Yamaoka, R. Niiyama, Y. Kakehi, “BlowFab: Rapid Prototyping for Rigid and Reusable Objects using Inflation of Laser-cut Surfaces,” in Proceedings of the 30th Annual ACM Symposium on User Interface Software and Technology (UIST ‘17), pp. 461-469, Oct. 2017,doi:10.1145/3126594.3126624
- Dynablock: R. Suzuki, J. Yamaoka, D. Leighinger, T. Yeh, M. Gross, Y. Kawahara, and Y. Kakehi, “Dynablock: Dynamic 3D Printing for Instant and Reconstructable Shape Formation,” UIST ‘18 The 31st Annual ACM Symposium on User Interface Software and Technology, pp. 99-111, Oct. 2018, doi:10.1145/3242587.3242659
領域横断の研究
異分野であるエネルギー・アクチュエーション・ファブリケーションの3領域による密接な連携により、グループ間での領域横断型の連携テーマが数多く生まれた。 具体的には、超音波で空中移動し無線給電で動作する超小型発光粒子「Luciola」、「無線給電で動作するイモムシ型ロボット」、先述の「Liquid Pouch Motors」、デジタルファブリケーション技術(印刷)を用いることにより、薄くて安価で量産可能な両面薄膜コイルが作製を可能とした「フレキシブルで省スペースな両面薄膜コイル」、やわらかく安全で、軽く、持ち運び可能なモビリティ「poimo」などを開発した。
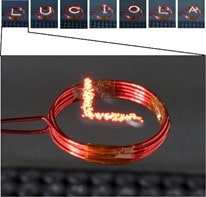

(左)長時間露光で撮影したLuciola (超音波ビームの収束位置を変化させアルファベットを描画) (右)フレキシブルで省スペースな両面薄膜コイル


(左)無給電により駆動するイモムシ型ロボット(右)poimo
特に「poimo」はボディ設計、駆動、給電、操縦方法に関して、全グループからそれぞれ研究員が参加してプロトタイプを設計した。第一弾としてスクータータイプとソファタイプを実装した後、第二弾としてユーザーに最適なモビリティを提案するソフトウェアと車両設計を行った。また、社会実装へ向けて運転性能の改善、やわらかなインタフェースの開発、無線給電ユニットの開発を行い、多くの展示等のアウトリーチ活動や実証実験を行った。本テーマは、株式会社メルカリの研究開発組織「mercari R4D」との共同研究として実施され、2020年1月からはインクルーシブ工学連携研究機構との連携として実施した。
- Luciola: Y. Uno, H. Qiu, T. Sai, S. Iguchi, Y. Mizutani, T. Hoshi, Y. Kawahara, Y. Kakehi, and M. Takamiya, “Luciola: A Millimeter-Scale Light-Emitting Particle Moving in Mid-Air Based On Acoustic Levitation and Wireless Powering,” Proceedings of the ACM on Interactive, Mobile, Wearable and Ubiquitous Technologies (IMWUT), vol. 1, no. 4, Article no. 166, Jan. 2018,doi:10.1145/3161182
- 無線給電で動作するイモムシ型ロボット: C. M. Caffrey, T. Umedachi, W. Jiang, T. Sasatani, Y. Narusue, R. Niiyama, and Y. Kawahara, “Continuum Robotic Caterpillar with Wirelessly Powered Shape Memory Alloy Actuators,” Soft Robotics 2020 7:6, 700-710, 17 Dec, 2020. doi: 10.1089/soro.2019.009
- フレキシブルで省スペースな両面薄膜コイル: Y. Nishizawa, Y. Narusue, and Y. Kawahara, “Enhancing the Quality Factor of Thin Film Printed Coils for Efficient Wireless Power Transfer,” Proc. of IEEE RWS 2018, pp. 25-27, Jan 2018,doi:10.1109/RWS.2018.8304936
- Poimo :R. Niiyama*, H. Sato*, K. Tsujimura, K. Narumi, Y. A. Seong, R. Yamamura, Y. Kakehi, and Y. Kawahara, “poimo: Portable and Inflatable Mobility Devices Customizable for Personal Physical Characteristics,” Proceedings of the 33rd Annual ACM Symposium on User Interface Software and Technology (UIST’20), pp. 912-923, Oct. 2020, doi: 10.1145/3379337.3415894