成果概要
誰もが自在に活躍できるアバター共生社会の実現[5] CA基盤構築の研究開発
2024年度までの進捗状況
1. 概要
多数のサイバネティック・アバター(CA)と操作者を結ぶCA基盤(CA-PF)の研究開発として「CA基盤構築と実証実験」および「サービス機能記述の標準化」に取り組みます。多数のCAを多数の操作者が利用するには、両者を結び付ける情報インフラとなるCA基盤が必要不可欠です。「CA基盤構築と実証実験」では、まず基盤の階層構造を明らかにし、各階層の機能を実現すると共に、階層間のプロトコルを定めます。基盤の階層は、利用者・CAモニタリング層、CA経験管理層、階層的CA連携層、操作者割り当て遠隔操作層です。プロトコルに従ってCA基盤のプロトタイプを実装し、街を対象とした広範囲の環境においてその性能を確かめ、新たな課題を発見していきます。「サービス機能記述の標準化」では、実社会実証実験に参加する企業による企業コンソーシアムと連携し、研究開発テーマ7(実社会実証実験)で実施される実証実験を通じて、異種サービス、異種CAの相互運用性やスケーラビリティを考慮したCA基盤に発展させます。
2. これまでの主な成果
CA基盤構築と実証実験
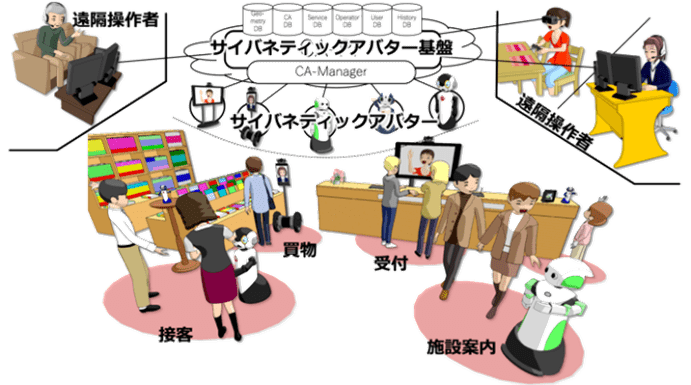
CA操作者の状況(在宅、モバイル)、模擬CAサービス提供場所の状況(広域多地点、高顧客密度)、模擬CAサービスの種類(受付・案内・見学・接客)を想定したCA基盤第4期プロトタイプを構築しました(図1)。

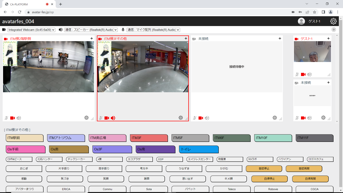
特に、広域多地点、高顧客密度に対応させるため、2023年度に開発したCAグループ管理機能に加えて、実験拠点ごとのCA管理機能(図2)と、各CAとCA基盤の接続状況(Round Trip Time、RTT)および遠隔操作者の忙しさをグラフィカルに表示し理解しやすくする機能(図3)などを追加しました。2023年度に実施した100体以上のCAを接続した1拠点での模擬CAサービスを提供する機能実証を拡張し、多拠点で模擬CAサービスを提供可能な基盤となっていることをシミュレーション環境および実社会環境にて確認しました。実社会環境での機能実証は、大阪と東京の2拠点に展開したCA 47体による異種CAサービス4種類を、国内5か所から遠隔操作して提供する実証実験の一環として、研究開発項目1・2・4・5・8と連携して実施し、機能の有効性を確認しました。
他のムーンショット目標1プロジェクトや研究開発項目7で運営しているアバター共生社会企業コンソーシアムの会員に対して、このCA基盤を広く利用してもらうために、期間限定でCA基盤を無償提供しました。
サービス機能記述の標準化
CAのサービス機能を記述する仕様は、国際標準化団体であるObject Management Group (OMG)のRobotics DTF(Domain Task Force)で標準化が進められている、ロボットサービスの機能要件を記述するためのオントロジRoSO (Robotic Service Ontology)と、対話サービスのためのロボット機能コンポーネントの仕様記述方法および具体的な共通コンポーネントの仕様を定めたRoIS (Robotic Interaction Service Framework)に盛り込む取り組みを進めました。RoSOでは、CAのサービス機能に関する仕様をRoSO1.0-FTF(Finalization Task Force)Reportに反映させ、2024年12月に提出・受理されました。これにより、RoSO1.0の実質的な標準化活動は完了しました。RoISでは、CA基盤のプラットフォーム仕様と、モジュール化されたCA機能、および操作インターフェース機能の定義を盛り込んだRoIS2.0 Revised Draftを策定し、2024年9月にOMGに提出・受理されました。
3. 今後の展開
CA基盤は、CAの種類、CA操作者の状況、CAサービス提供場所の状況、CAサービスの種類、等を組み合わせた様々な状況での利用が想定されます。異種サービス、異種CAの相互運用性やスケーラビリティを考慮したCA基盤の研究開発と国際標準化活動を引き続き推進するとともに、公共・商業施設や大阪・関西万博会場などのイベント会場における大規模な機能実証により有効性を示します。