
総括責任者 川人 光男
((株)国際電気通信基礎技術研究所 先端情報科学研究部 プロジェクトリーダー)
研究期間:1996年10月~2001年9月
計算論的アプローチ、心理学・非侵襲脳活動計測、神経生理学モデリング、ロボティックスの4つの手法を有機的に組み合わせ、学習、思考、コミュニケーションなどのヒト脳の高次機構を計算論的に解明することを目指した。その結果、ヒト小脳内内部モデルの存在証明、平衡位置制御仮説と内部モデル仮説の統合、インピーダンス制御の実験的証明、大脳皮質・大脳基底核・小脳の統一学習モデル、階層多重順逆モデル対によるコミュニケーションの研究、下オリーブ核のカオスによる低発火頻度符号化等の新しい成果が得られた。また、理論を計算の観点から実証するため、ヒューマノイドロボットを開発、見まね学習、前庭動眼反射、平滑性眼球運動などの実装に成功した。さらに、階層強化学習の実証として、起き上がりロボットを開発した。
これらの研究は、脳の仕組み解明に新たなパラダイムを与えるだけでなく、その成果が、リハビリテーションやロボット制御といった様々な応用に繋がることが期待される。
成果
学習アルゴリズムに応じた脳の専門化と組織化
小脳、大脳基底核、大脳皮質はそれぞれ、教師あり学習、強化学習、教師なし学習に特化した回路とする枠組みを提案した。これをもとに、小脳の内部モデルによる状態予測と、基底核の報酬予測による行動選択が、大脳皮質の状態表現のもとで統合される仕組みを明らかにした。
階層並列強化学習システム
柔軟かつロバストな脳の学習の原理に迫るため、並列的な予測と階層的な行動計画を実現する強化学習方式を理論的に定式化した。それらをもとに、ロボットに自ら試行錯誤により起立運動を獲得させる実験に成功し、階層並列強化学習の有効性を実証した。
小脳に獲得される多重内部モデル
人間はさまざまな道具や操作対象物を次々に持ちかえて操作することができる。複数の新しい道具の使い方を学習しているときの脳活動を計測し、小脳の異なる場所に、異なる道具の操作特性を反映する神経機構が学習されることを明らかにした。
不安定な状況下における手先剛性の適応的変化の解明
道具を用いるときなどに、対象物と不安定な相互作用が生じる。マニピュランダムを用いて不安定な環境における手先剛性を測定した結果、不安定な状況では、手先剛性を最適な大きさと方向に予測的に変化させて安定化させていることが明らかになった。
計算神経科学のテストベッドとしてのヒューマノイドロボット研究
計算神経科学のモデルを実験的に探求するために眼球運動系を含んだ全身型ヒューマノイドを開発し、生物の内部モデル学習に関する理論を統計学習アルゴリズムへと組込んで、高次元な内部モデルを実時間で可能なことを示した。また、周期的に腕の運動を生成する制御モデルも開発しドラミングを実装した。
眼球運動制御の計算モデル
霊長類の適応的な眼球運動制御に関する制御モデル構築およびロボットへの実装を行ない、これらの制御に必要な最小限の制御回路の構成や、適応のためのオンライン非線形学習の実装に関して理解を進めた。具体的には、前庭動眼反射、円滑性追跡眼球運動、衝動性眼球運動を実装した。
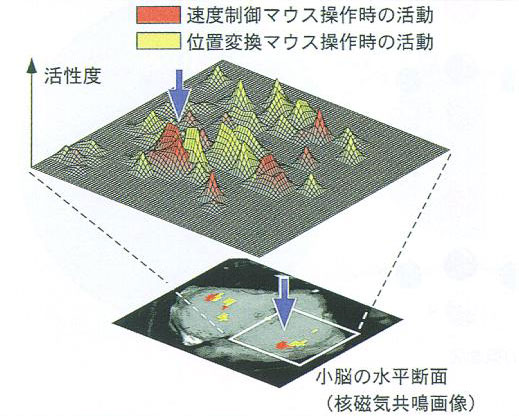
▲操作特性の異なる2種類のコンピュータマウスを使っているときの人間の小脳活動の違い。

▲30度自由度を持ったヒューマノイドロボット

▲試行錯誤を繰り返す間に学習して立ち上がる2関節、3リンクのロボット
