
Research Director: Mitsuo Kawato
(Project Leader, Computational Neuroscience Project & Cyberhuman Project, ATR)
Research Term: 1996-2001
Based on experimental evidence from visuo-motor coordination tasks, the Kawato project has proposed a bi-directional theory of cognition and motor control. This theory is built on the dynamical interactions among internal models in the brain that represent parts of the external world. The validity of this theory has been tested in biological studies of eye-movement control, where, for instance, it was shown that a particular part of the cerebellum constitutes an inverse-dynamics model of the eye dynamics. In a variety of manipulation tasks, it was furthermore demonstrated that this theory can be used for learning and control in robots.
Research Results
Parallel and hierarchical motor learning mechanisms: A parallel learning framework for sequential movement was proposed in which kine- matic, visuospatial information is used for quick acquisition of novel motor behaviors while dynamic, sensorimotor information is used for robust execution of movements. Using a hierarchical architecture, a three-link robot successfully learned to stand up by trial and error with the height of the head as the reward and tumbling as the punishment.
Specialization and collaboration of brain areas: Neurobiological data and theoretical models suggest that different brain areas are specialized for specific learning algorithms. Efficient learning decision-making implemented in a global brain circuit was considered by combining the internal models in the cerebellum and the evaluation functions in the basal ganglia via state encoding in cortical areas.
Internal models contributing to higher order brain functions: Visualization of internal models in the human cerebellum using functional magnetic resonance imaging was achieved. Although the notion of internal models was originally proposed in studies of biological motor control, the findings of this project strongly suggest that internal models contribute to higher order cognitive functions.
Adaptive Control of Human Impedance: Methods were developed to estimate human multipoint arm impedance by electromyography as well as by perturbation studies using a robotic interface through which any change in stiffness was assessed during and after adaptation to various environments. It was demonstrated that, under destabilizing environment, the central nervous system optimized stiffness at the hand in a predictive way to achieve stability.
Humanoid robot as a test bed for computational neuroscience: A fullbody humanoid robot was developed, including an oculomotor system, for experimental explorations of models in computational neuroscience. Theories of biological learning of internal models were converted into statistical learning algorithms and tested on the robot. It was shown that high-dimensional internal models of a complete humanoid are learnable in real-time, thus providing evidence that biological systems may have similar abilities.
Computational models of oculomotor control: Models and robotic implementations of the primate precise and adaptive oculomotor control were developed, leading to a better understanding of the minimal control circuit, and to direct contributions to brain science.

Humanoid Robot with 30 active degrees of freedom
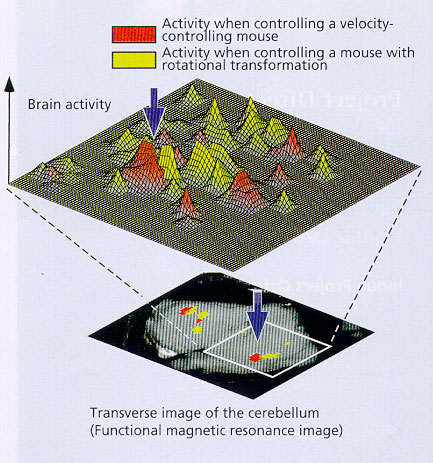
Difference in cerebellar activities
caused by two types of novel kinematic relationships
between a computer mouse and a cursor.

The 2-joint, 3-link robot learns to stand up
through trial and error.
