成果概要
身体的共創を生み出すサイバネティック・アバター技術と社会基盤の開発[3] 身体技能の多様性融合技術(技能融合研究グループ)
2024年度までの進捗状況
1. 概要

自分と他者の技能を融合し
個人の能力を
超えられる身体
複数人が1つのサイバネティック・アバター(CA)に同時接続し、互いの感覚と運動を共有しながら行動することで、人々が持つ多彩な身体技能を共有し融合するための技術を開発します。技能を共有し個々人の能力を超えた高度な技能を発揮できるCAを実現することで、目標1が目指す「身体の制約からの解放」に貢献します。

身体の多様性を包摂する技能共創技術の開発
田中 由浩(名古屋工業大学)

身体融合における意図調停と身体反応制御技術の開発【~2023年度】
大澤 博隆(慶應義塾大学)

サイバネティック・アバター技術によるフレイル治療に向けた内在的能力賦活化【2023年度~】
平田 仁(名古屋大学)

体性感覚融合に基づく技能融合と共感支援技術の開発【2024年度~】
西田 惇(University of Maryland)
2. これまでの主な成果
- (1)複数人で1つのロボットを操作して連携協調する技能融合CAプラットフォームの高度技能への展開
- (2)技能融合CAを活用した重度の障害当事者による遠隔共創作業の実現
- (3)感覚・運動の伝送による技能共有・学習手法の開発
- (4)フレイルコホートを活用した内在的能力評価手法の開発
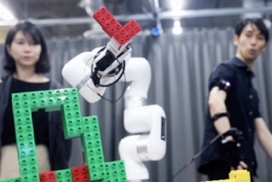
(1)では、異なる技能や経験を有する他者との技能共創の実現を目指し、1つのロボットを複数の操作者が同時に操作し協調作業を行う技能融合CAプラットフォーム 「Collaborative Avatar」を開発しました。複数人の運動を一定の割合で融合し、動作の役割分担や感覚の共有を行うことで、1つの身体性を操作者間で共有することができます。伝統工芸分野の技能伝承に向けて陶芸の技能を対象に、職人とCA上で融合することで未熟練者が高い主体感で陶芸が行えることを示しました。
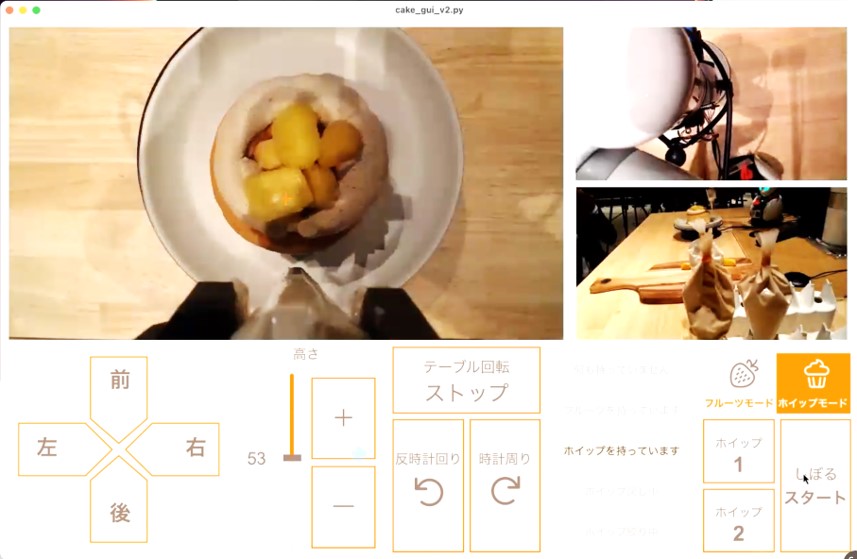
(2)では、技能融合CAを障害当事者の就労支援に活用し、分身ロボットカフェにて2人の重度障害当事者が技能融合CAを操作し、一般客に向けてケーキのトッピングを行うサービスを実施しました。操作者が、遠隔かつ融合しながら主体感を持って共創的に作業でき、技能融合CAが円滑な連携協調と個々人の能力・創造性の発揮を両立できることを明らかにしました。
(3)では、ネットワーク越しに人から人への直接的な技能共有を実現することを目的に、感覚や運動の伝送に基づく技能の遠隔共有基盤の開発を進めています。遠隔地にいる理学療法士が拘縮の評価を行える遠隔触診システムや、視覚と触覚の異種感覚刺激やEMSにより効果的に運動共有し、ドラム演奏を支援するシステムを開発しました。
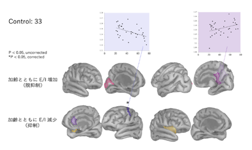
(4)では、100名の高齢者コホートを運用し、フレイル評価を実施しました。脳磁計とfMRIを用い、CAを通じた運動感覚への介入による高齢者の注意や主体感の向上を確認しました。



3. 今後の展開
技能融合CAの高度化を目指し、個々人のCA操作モデルに基づく技能AIとの融合や、主体感や連携協調を向上する制御手法の開発を進めています。人から人への直接的な技能共有では、運動情報に応じた提示情報のパーソナライズを行い、即時的な技能の拡張、主体感の向上を目指します。
社会応用では、伝統工芸や医療分野を対象に技能融合CAを活用して、熟練者やその操作モデルとの主体感を伴う融合を通じた熟練技能の発揮や技能伝承に取り組みます。また、高齢者を対象に、感覚・運動の共有を通じた能力向上によるフレイル予防の効果検証を実施します。