成果概要
一人に一台一生寄り添うスマートロボット[1] スマートロボットの身体と制御システムの構築
2024年度までの進捗状況
1. 概要
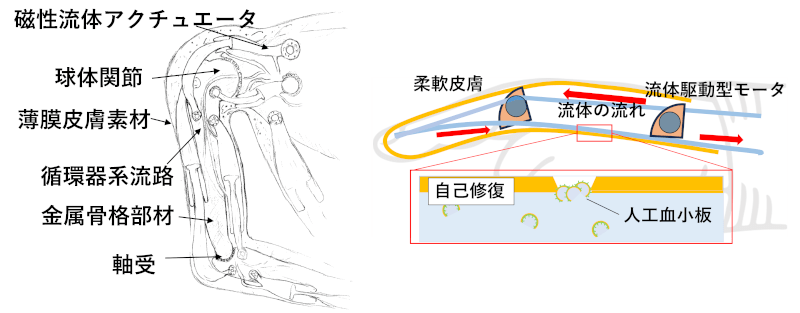
現在のロボットハードウェアは、その精度と耐久性(剛性)を重視するがゆえに極めて硬く重くなり、例えば接客、家事、福祉、看護、医療など、日常生活において人の支援を行うための安全性の問題を本質的にクリアできません。そのため、ロボットハードウェアを構成部材、表皮、関節などを含めて本質的に“柔らかく”し、人の全身を支えられるパワーを有しつつ、衝突しても人間に危害が加わらない受動柔軟性を備えたアーム・移動機構および各種の道具を使うことが可能なハンドを有するロボットの身体を設計・製作します。具体的には、柔軟関節、柔軟皮膚、磁性流体アクチュエータ、高精度触覚センサに加えて、油剤・冷却剤・潤滑剤などの体液を身体に循環させることで自己修復・維持機能を持たせた、人と共存可能なドライ・ウェットハイブリッドスマートロボットを開発します(図1)。
2. これまでの主な成果
研究開発課題1-1: 人間との接触を伴う作業が可能なロボットシステムの構築
本プロジェクトで開発した世界最高水準の人共存型ドライロボット(Dry-AIREC)による人との物理的接触を伴う動作に関する各種実験を行うとともに、人の生体を模した新しいドライ・ウェットハイブリッドスマートロボットの実現に向けて、以下の研究開発を実施しました。
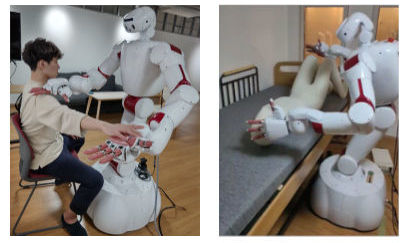
- RGB画像のみに依存せず、対象物の概念に基づくセマンティック情報を導入することで、未知の足の形状や背景環境にも対応可能であるようにモデルの汎化性を向上させ、加えて奥行き情報を用いることで、靴下と足の相対的位置関係の推定が容易となり、信頼性の高い靴下着衣動作を実現(図2)。
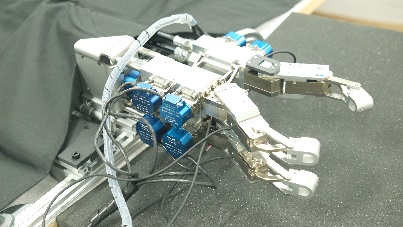
- 全18自由度の回転型流体アクチュエータによるロボットシステム(上半身)のハードウェアを開発し、重量物持ち上げ実験を実施(図3)。3指+1親指で構成される4指流体駆動ロボットハンド(ホースレス、全14自由度)を開発し、空き缶の握り潰し実験を実施。(図4)。
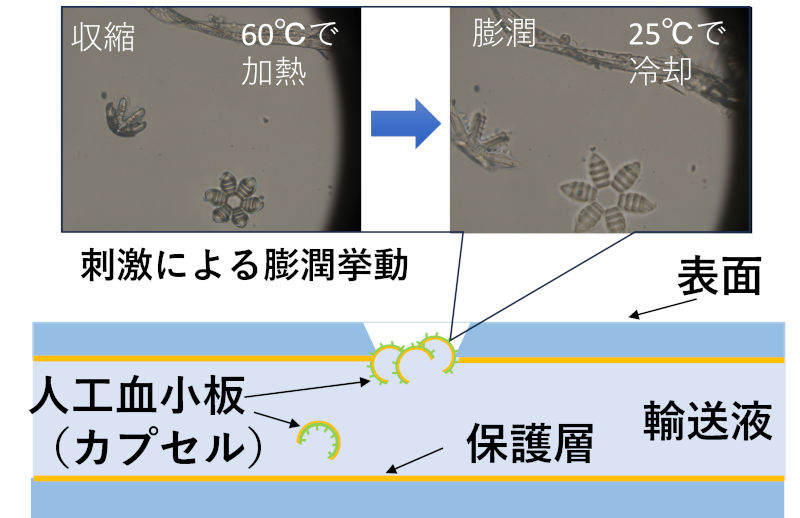
- 流路の入ったハイドロゲル製の皮膚を硬い構造の周りに重合する技術開発を行い,皮膚内での液体循環を実現(図5)。

研究開発課題1-2:スマートロボット用ミドルウェアの構築
RT System Integration Frameworkの改良を進め、複数物体への対応を考慮に入れた把持動作や健康モニタリング動作を実現しました。
研究開発課題1-3:スマートロボットの頭脳を実現するコンパイラ協調低消費電力AIプロセッサの開発
深層予測学習処理の高速化を目指し、試験的に組み込みGPUを活用してDry-AIRECに実装し、評価の結果、高性能デスクトップPCと同等の動作を達成できました。
3. 今後の展開
引き続き、介護分野を中心に、人との接触を伴う各種応用場面を想定したDry-AIRECへのAI実装、回転式流体アクチュエータロボットによる重量物運搬等の機能検証、自己修復機能における人工血小板製造技術の向上や傷口への人工血小板の接着、ウェット型触力覚センサの機能検証等を進めます。さらに、コンパイラ協調低消費電力AIプロセッサのDry-AIREC への導入・検証など、ロボットハードウェア、ミドルウェア、AIチップの開発を統合的に進める予定です。