成果概要
一人に一台一生寄り添うスマートロボット[3] スマートロボットの福祉・医療への展開技術の構築
2024年度までの進捗状況
1. 概要
本研究開発項目では、介護、看護、医療(診断・治療)が行われる施設、病院において、働く人や訪れた人たちを支援するスマートロボット(AIREC, AI-driven Robot for Embrace and Care)の実現を目指し研究開発を行なっています。このような場所では人とAIRECが互いに触れ合うため、AIRECはやさしく安全に動かなくてはならず、さらに、AIRECは治療などに使われる専用の各種道具を上手に使いこなさなければなりません。このような人との親和性、安全性などを考慮し、医療や福祉の現場で働けるAIRECの実現を目指し研究開発を行なっています。
2. これまでの主な成果
① 健康モニタリングを実現する情報基盤システムの開発
体温や脈拍などの生体情報を取得し、どのメーカーのどんな機種からのデータでも将来的にクラウドで一括管理できるシステムのプロトタイプを構築しました。AIRECが日常生活の中で人に近づき、触れ、自然な形で生体情報を取得するためのAIREC用計測センサの開発を行いました。また、AIRECと生体情報管理システムが連携し、人と対話しながら健康モニタリングを行う実証実験を実施しました(図1)。
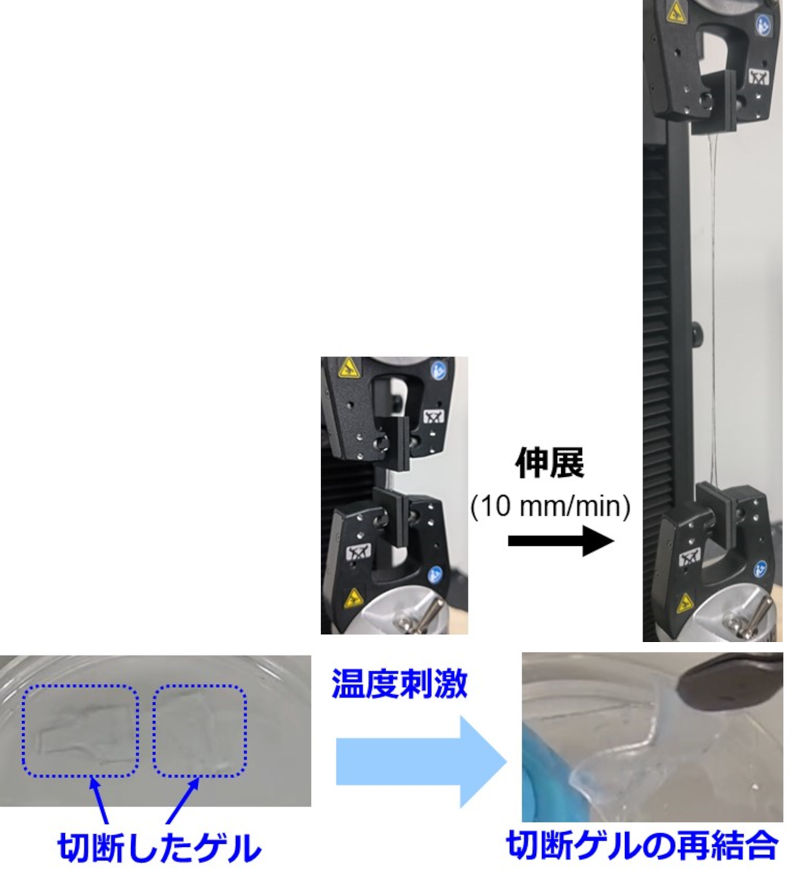
② 人に寄り添い、支えるロボットハンドスキンの開発
人の手に代わるバイオハイブリッド型ロボットスキンの実現を目指しています。傷ついても自己修復する機能を持つゲルや人の皮膚のようによく伸びるゲル(図2右)を開発しました。また、人の血管のようにロボットに必要な物質を運ぶ流路を埋め込んだゲル(図2左)も開発しています。

③ 病院の検査・施設案内をする機能の開発
AIRECが相手に寄り添った案内を行うために、骨格検知機能によって相手の身長や手の高さに合わせて手を差し出す機能を実装しました(図3)。また、AIRECがどちらに移動するかが周りの人にわかりやすいように進行方向に顔を向けLEDライトを光らせる機能を実装しました。

④ 5R(正しい;患者、薬剤、用量、用法、時間)を守って与薬・薬管理が可能な機能の開発
5Rを担保する与薬支援ソフトウェアとそれと連携するロボットシステムの開発を行っています。薬の入ったケースを正しい患者さんのもとへ運び、正しい薬が入っているか確認して渡すロボット動作を実装しました(図4)。
⑤ 様々な場所で活用できるロボットハンドの開発
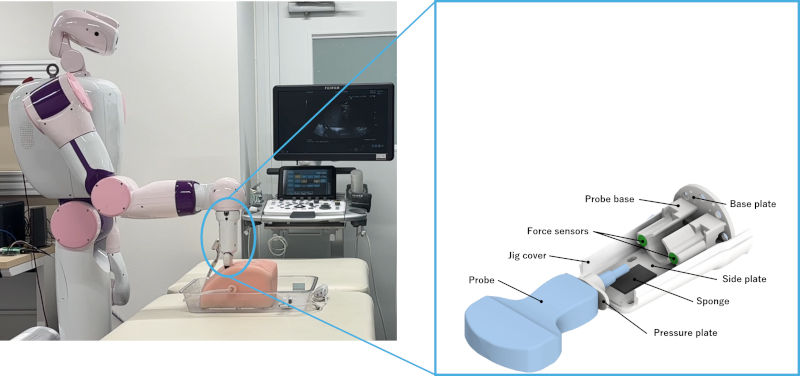
自己修復性のあるゲルとカメラ・感温性微粒子を組み合わせたゲルセンサを開発し、自己修復ゲルの傷を検知するAIを構築しました(図5左)。高精度な触診の実現を目指し、2指ハンドの振動伝搬による腫瘍等判定AIを構築しました(図5右)。また、AIRECによって撮像した超音波画像に対する画質指標数値の分析を行い、力の情報と総合的に判断して超音波プローブ操作動作を生成するAIを構築しました(図6上左)。

⑥ 福祉・医療ロボット設計と品質保証・国際標準化・リスク管理
AIRECによる身体負担のかからない介護動作生成を目指し、仰臥位→側臥位の体位変換をする際の被介護者の動作の軌跡を体型に応じてモデル化しました(図6上右)。専門委員会を立ち上げ、AIRECのような汎用的なサービスロボットが医療に関わる際の安全基準について議論しました。
人を支えるロボットであるAIREC特有のリスク管理方法を検討するため、介護老人保健施設へのロボット導入による検証を開始しました(図6下)。支援対象やAIREC周辺環境の状況把握は必須であることが明らかになりました。また、AIRECが支援時に接触する際のリスクを見据え、触れた部位の硬さから腕の状態を把握する、フレキシブル変位センサと力センサを組み合わせたロボットハンド用センサモジュールを試作しました。

3. 今後の展開
今後は、これまでの開発成果のAIRECとの連携及びAI導入を行うことで、AIRECが人と触れ合いながら各機能を正確に自律的に行い、社会で活躍するための研究開発を、社会倫理を考慮した上で進める予定です。