成果概要
一人に一台一生寄り添うスマートロボット[2] スマートロボットの知能システムの構築
2024年度までの進捗状況
1. 概要
現在の人工知能技術において、最大の課題の一つとして「モラベックのパラドックス」が存在します。このパラドックスは、大人になって可能になる対話や論理推論に比べ、子供でも半無意識的に実行可能な作業が、最新の人工知能にとって非常に困難であるという矛盾を指摘しています。この問題は、近年のChatGPTなどのLLM(大規模言語モデル)の発展によってより顕在化し、Google DeepMind、OpenAI、テスラなど世界のAIのトップ企業が、LLMの次のターゲットとしての”(人型)ロボット”に着目し、2023年には非常に大きな分野に発展しました。
本研究では、脳神経科学の知見を背景とした独自のアプローチである「深層予測学習」を活用し、人間の手作業、特に家事を支援するロボット知能の実現を目指します。深層予測学習は、深層学習技術を応用し、リアルタイムで高次元の感覚と運動の変化を予測し、予測誤差を最小化するためのフレームワークです。既に本手法によって、衣類や食材のハンドリング、家屋内での移動などのタスクを実現しており、今後も研究成果を拡大していく計画です。
2. これまでの主な成果
プロジェクトで開発した人間協調ロボットDry-AIREC、その他のロボット群を用いて、複数の動作学習研究を展開しました。以下にその一部を示します。
1)調理における複数動作の学習:
ロボットが順を追って複数のタスク(例えば材料を認識してから調理動作を行うなど)を処理するため、物体の特徴を表現する「潜在空間」を持つ複数の深層学習モデルを活用した学習システムを提案しました。調理の一連の作業である「パスタやスープの注ぐ動作」と「かき混ぜる動作」を評価対象とし、注ぐ動作とかき混ぜる動作を連続して実行できることを確認しました。

2)動作高速化に関する研究:
時間をかけて高品質なデータを収集し、その上で実際にロボットが動作する際には、モデルが現実世界の時間の数倍速で推論を行うことで、高速動作を実現する手法を提案しました。本手法により、教示段階でモデルに3倍速で推論させることで、実際のロボットがランダムに配置されたカップを、高速でかつ平均94%の成功率で積み上げることができることを確認しました。
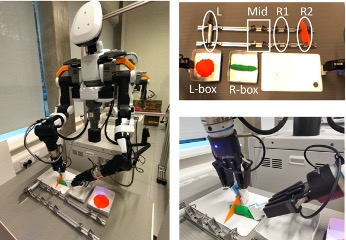
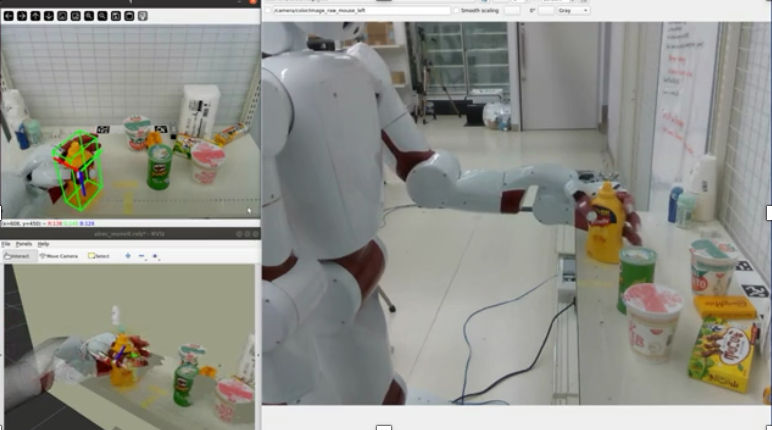
3)多様な環境下での物体把持:A
IRECに搭載した視覚からの力の分布推定に基づく複数商品のピッキング技術について、2025年3月7日に開催された日本科学技術未来館での公開シンポジウムや産業技術総合研究所のコンビニエンスストア模擬環境でのデモンストレーションなどを実施し,複数の人間がいる中で自律的にデモを継続するとともに、ピッキングの作業成功率は85%を超えることを確認しています。
4)転移学習のためのロボット基盤モデル構築:
AIロボットのタスク獲得プロセスの効率化を実現するロボット基盤の構築を目指して、簡易型の双腕モバイルマニピュレータAIREC-Basicを製作し、ドラム式洗濯機内の洗濯物を取り出すタスクなどを例に、高難度タスク獲得基盤の開発・検証等を実施しています。

3. 今後の展開
2024年度から世界トップAI機関である英国エジンバラ大学が参画し、長期タスクを実現する階層的モーションプランニングに関する研究を実施しています。Dry-AIRECに実装し技術検証を進めるとともに、国際的な成果発信をしていきます。さらに、同じく2024年度から株式会社日立製作所が参画し、AIREC-Basicを用いたロボット基盤モデル構築に関する研究を進めています。今後は現実的な社会実装に向けて、多様なタスクの学習とデモンストレーションを行う予定です。