
研究総括 浅田 稔
(大阪大学 大学院工学研究科 教授)
研究期間:2005年9月~2011年3月
近年の脳科学は、最先端可視化技術の発達により、様々な脳活動を計測し、更なる解析と新たな課題を生み出しつつありますが、現象の説明で終わることが多く、内部メカニズムの動的なシステムとしての記述に欠けていました。そのため、実世界で起きている、他者を含む外部環境との相互作用のモデル化が困難でした。21世紀の生命科学では、この課題を多様なアプローチにより解決することが望まれています。
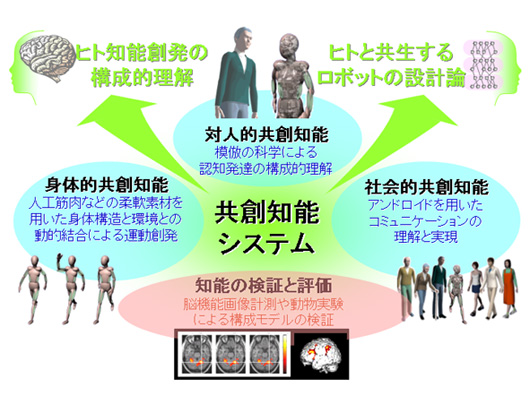
本プロジェクトでは、構成的手法による人間の認知発達過程の理解を目的として、身体的共創知能、対人的共創知能、社会的共創知能、共創知能機構の4つのグループにより、この課題にアタックし、いくつかの認知発達過程のモデル化及び関与する脳内基盤の対応づけを可能としました。また、二歳児までの運動発達プロセスの機能を実装し、ロボット研究者のみでなく幅広い分野の研究者が使用可能な各種ロボットプラットフォームを開発し、大きな成果となりました。
今後は、これらに基づき、新たな理解を創出する多くの成果とそれらの集約による新分野の確立が期待されます。
研究成果
A:身体的共創知能グループ
運動機能学の知見に基づき、空気圧人工筋を人間に類似した筋配置の構造にすることによって、これまで定性的にしか言われてこなかった、走行や跳躍などの人間の動的な運動制御に関して、実験的に実証してきた。この間、筋骨格構造を持つロボットのための関節構造を開発し、特許申請もしている。そして、これらの蓄積を基に、発達の観点から、「外旋歩行仮説」を歩行発達の初期における行動規範として提唱し、実際の赤ちゃんの計測を踏まえて、赤ちゃんロボットPneuborn-13を使って実証実験を行い、仮説の妥当性について検討した。また、初期ロコモーションとして、はいはい運動に着目し、神経振動子による運動学習を実験するためのプラットフォームとしてPneuborn-7 およびPneuborn-7IIを対人的共創知能グループ及びその共同研究先である東京大学大学院理工学研究科からの助言を得て開発した。実験では脊椎の三つの姿勢に関する条件を定めて、実時間で学習し伸展条件で前進運動を実現した。これら、ロコモーションの発達は認知の発達と密接な関係にあることは明白であり、それらの相互作用の原理解明やモデル化に向けた研究が継続して行なっている。また、より広い関節可動域と柔軟な皮膚構造を有するPneuborn-7IIIの開発を進め、ヒトに近い駆動系および感覚系に基づく運動発達モデルの構築に取り組んでいる。さらに、人間にきわめて近い筋骨格構造を持つ上肢システムを構築し、そのさまざまな振る舞いと、ヒトの到達把持運動の認知発達構造との関連について共創知能機構グループと連携し、解析を進めている。
- 細田耕,”身体的共創知能-柔軟な身体構造と環境との相互作用から生み出される適応性”,人工知能学会誌,27巻,1号,pp.28-33,2012
- 成岡健一 細田耕,”筋骨格ヒューマノイドのロコモーション研究”,日本ロボット学会誌,30巻,1号,pp.8-13,2012
- Kenichi Narioka, Soichiro Moriyama, Koh Hosoda, ” Development of infant robot with musculoskeletal and skin system”, The 3rd International Conference on Cognitive Neurodynamics, 2011
- 細田耕, 発見的バイオロボティクスアプローチと適応的二足歩行, 日本ロボット学会誌, Vol.28, No.4, p.111-116, 2010 .
- Kenichi Narioka and Koh Hosoda, Designing Synergistic Walking of a Whole-Body Humanoid driven by Pneumatic Artificial Muscles: An empirical study, Advanced Robotics, Vol.22, No.10, pp.1107-1123, 2008.
- Shinya Takamuku, Koh Hosoda, and Minoru Asada, Object Category Acquisition by Dynamic Touch, Advanced Robotics, Vol.22, No.10, pp.1143-1154, 2008.
B:対人共創知能グループ
ヒトの初期発達において、脳神経系、身体、母胎環境の三つの相互作用が本質的な要因となることを構成論的に示した。胎児・新生児の筋骨格・感覚・神経系モデルと胎内環境モデルに基づく発達シミュレーションを構成し、四肢の突発運動や手と顔の接触動作の発現に関して、ヒト胎児と同様の発達経過が再現されることを示し、それが感覚経験に大きく左右されることを示した。さらに、生誕後の環境で、はいはいや寝返りなどの運動パターンの創発も観測された。母胎環境からの学習実験の発想は、非常にユニークであり、設計原理による胎児の感覚運動学習の可能性を示したことは、まさに「身体が脳を形作る」好例であり、発達を科学する上で、貴重な研究プラットフォームが構築されたと評価できる。これは主に運動発達の基盤を構成的に明らかにしようとする試みである。他方、認知発達モデルとして、視覚観測不可能な顔の触覚配置の獲得、アイコンタクト学習モデル、身体性に基づく初期言語獲得(オノマトペ)、音声模倣、道具使用による身体の視覚受容野の拡張などを個別に行なって来たが、それらを集約するための研究プラットフォームとして、現状技術で可能な限り9ヶ月児を模した赤ちゃんロボットNobyを開発した。Nobyは、電動モータで駆動されながらも、従来のギアを介した堅い動きではなく、腱駆動による柔らかい動きを実現し、視覚、聴覚、柔らかな皮膚の全身触覚、発声も可能な全身感覚運動学習用認知発達ヒューマノイドである。これを用いて、乳児の物体志向動作獲得をモデル化し、ガラガラやカスタネット、キーボードなど様々な物体を用いて実験を行ったところおもちゃや道具の特徴をよく表すような動作が獲得された。また、実世界中の対象に対して興味が移り変わるような赤ちゃんの性質を、視覚情報から注目度を抽出し馴化モデルと統合することで興味度マップを構成してモデル化し、ロボット自身の行動による環境変化が興味を持続させることを検証できた。特に、対人動作への移行は社会性知能の発生に繋がると考えられ、さらなる研究を進めている。
- Yasuo Kuniyoshi and Shinji Sangawa, Early Motor Development from Partially Ordered Neural-Body Dynamics: Experiments with A Cortico-Spinal-Musculp-Skeletal Model, Biological Cybernetics, Vol.95, No.6, pp.589-605, 2006.
- Alexandre Pitti, Hassan Alirezaei, and Yasuo Kuniyoshi, Cross-model and Scale-free Action Representations through Enaction, Neural Networks, Vol.22, Issue.2, pp.144-154, 2009.
- Alexandre Pitti, Hiroki Mori, Shingo Kouzuma, and Yasuo Kuniyoshi, Contingency Perception and Agency Measure in Visuo-Motor Spiking Neural Networks, IEEE TRANSACTIONS ON AUTONOMOUS MENTAL DEVELOPMENT, Vol.1, No.1, pp.86-97, 2009.
- Alexandre Pitti and Yasuo Kuniyoshi: Modeling the Cholinergic Innervation in the Infant Cortico-Hippocampal System and its Contribution to Early Memory Development and Attention, International Joint Conference on Neural Networks (IJCNN 2011), pp.1409–1416, 2011.
- 國吉康夫、寒川新司、塚原祐樹、鈴木真介、森裕紀、人間的身体性に基づく知能の発生原理解明への構成論的アプローチ、日本ロボット学会誌、Vol.28, No.4, pp.415-434, 2010.
- 森裕紀,國吉康夫, 触覚を通して反射的行動を自己組織化する子宮内胎児の神経発達モデル, 日本ロボット学会誌 Vol.28, No.8, P.100-110, 2010.
- 國吉康夫, 森裕紀:対人的共創知能研究-胎児から社会性認知基盤に至る発達モデルの構築-,日本ロボット学会誌,vol.30, no.1,pp.14-19, 1月, 2012.
C:社会的共創知能グループ
物理的な相互作用を人間と等身大で行なえる研究プラットフォームとして、CB2 を開発し、内外から非常に大きな反響を得た。人の補助によるCB2 の起き上がりの実験では、相互作用を大局的なパラメータで可視化し、補助の成功例や失敗例を識別した。等身大のヒューマノイドで物理的な相互作用の実験を行なったのは、世界で初めてである。CB2は、研究プラットフォームとしては、運動性能や可搬性、対人性などで欠ける部分があり、これを補うための研究プラットフォームとして、運動性能に重きを置いたNeony、対人性に重きを置いたKindy、さらにコミュニケーション実験などを意識したSynchyの三種の研究プラットフォームを開発しプレス発表を行なった。これら三種は、社会性獲得に至る相互作用の時間的なスケールに依存した分類とみなすことが出来る。すなわち、環境との即応的な応答を基にした身体的相互作用、対人環境での随伴性に基づく対面相互作用、そして、複数のエージェント間の社会的相互作用である。身体的相互作用では、CB2による起き上がり実験で人間の判断を学習ループに組み込んだ運動改善、他者に触れられた時の触覚分布データの統計的解析による自他分離の構成的実験を行い、それぞれの仮説を検証した。Neonyを用いた実験では、ランダムウォークによる全身運動学習としてはいはい運動学習を行った。対面相互作用では、共同注意の発達に焦点を当て、随伴性発見と再現に基づく社会的行動獲得モデルを提唱し、実験で検証した。社会的相互作用では、第三者の存在による社会的認知に関する既存の説を構成的に再現し、実証した。これらに並行して、乳幼児のタイミングに関する認知発達の観測を実施し、運動の時間的/空間的特性の解析をすすめ、ロボットによる実験との連携を図っている。この際。共創知能機構グループからの知見やアドバイスを受けている。
- Shuhei Ikemoto, Takashi Minato, Hiroshi Ishiguro, Analysis of physical human-robots interaction for motor learning with physical help, Applied Bionics and Biomechanic, Vol.5, No.4, pp.213- 223, (Special Issue: HUMANOID ROBOTS ) 2008.
- 野田智之、宮下敬宏、石黒浩、萩田紀博、全身分布触覚における触覚特徴の局所性に注目した人間-ロボット間インタラクションの識別、日本ロボット学会誌、Vol. 27, No. 6, pp.669-678, 2009.
- 中野吏、吉川雄一郎、浅田稔、石黒浩、相互排他性原理に基づくマルチモーダル共同注意、日本ロボット学会誌、 Vol.27, No.7, pp.814-822, 2009.
- Fabio Dalla Libera, Takashi Minato, Ian Fasel, Hiroshi Ishiguro, Enrico Pagello, and Emanuele Menegatti, A new paradigm of humanoid robot motion programming based on touch interpretation, Robotics and Autonomous Systems, Vol.57, Issue.8, pp.846-859, 2009.
- 池本周平、Heni Ben Amor、港隆史、Bernhard Jung、石黒浩, 物理的な人間―ロボット間インタラクションを利用した柔軟関節ヒューマノイドロボットの運動学習, 日本ロボット学会誌 Vol.28, No.8, P.111-121, 2010.
- Hiroshi Ishiguro, Takashi Minato, Yuichiro Yoshikawa, and Minoru Asada, Humanoid platforms for cognitive developmental robotics, International Journal of Humanoid Robotics, , Vol.8, No.3, pp.391-418, 2011
- 社会的共創知能へのアプローチ―社会的行動獲得と社会関係構築の相互作用の構成―,吉川雄一郎,石黒浩,人工知能学会 誌,Vol.27, No.1,p.12-19, 2012
D:共創知能機構グループ
「認知発達の脳内メカニズムの解明」
これまでの共創知能研究の成果を踏まえて、過去5年間で提案を行ってきた認知発達の現象を説明するいくつかのモデルを発達的につなげることを目的とした。また、自他分離および道具使用に関するモデル化を進めるとともに、言語獲得のモデルの拡張を行った。
1)道具使用に関しては、「力学的推論」の機能が重要であることに着目し、3つのFMRI実験を行い、力学的推論に関連する脳部位を特定し、脳内機構について考察した。具体的には、物体間の相互作用を理解する機能には左SMG,決められた手順での物体操作をイメージする機能には左SMG とIFG が関与していることが示唆され,これらが協調することにより力学的推論が実現されていると考えた.
2)言語獲得モデルの拡張に関しては、特に言語の階層構造の理解を行うネットワークの同定を行った。その結果、左DLPFCとブローカ野との相互作用を含むより大きなネットワークの同定をDCMを用いて、モデル化を行うことに成功した。具体的には、複文の階層処理において、DLPFCからブローカ野への抑制性制御が行われていることが明らかにされた。
3)自他分離に関するモデル化については、これまでERATOとは別のプロジェクトで進めてきた研究を基礎にミラーニューロンシステムと心の理論ネットワークとの間の相互作用に着目し、モデル化を進めている。
4)発達モデルをシームレスに繋ぐことを検討した。そのなかで、昨年度までに指摘した神経修飾物質の濃度変化が初期認知発達において重要な役割を果たしているという可能性を検討するために、自閉症において神経修飾物質の計測を具体的に検討した。また、昨年度までに提案している発達障害(自閉症とウィリアムズ症候群)の脳モデルについてさらに精緻なモデルにするべく検討を行い、論文化を進めている。
- Ogawa, K., and Inui, T. (2012) Reference frame of human medial intraparietal cortex in visually guided movements. Journal of Cognitive Neuroscience, 24, 1, 171-182.
- Ogawa, K., and Inui, T. (2012) Multiple neural representations of object-directed action in an imitative context. Experimental Brain Research, 216, 1, 61-69.
- 乾 敏郎 (2011) 神経系の発達、胎児の運動発達と顔バイアスの獲得過程. 心理学評論, 54, 2, 123-137.
- Takemura, N., and Inui, T. (2012) A neural network model for development of reaching and pointing based on interaction of forward and inverse transformations. IEEE Transactions on Autonomous Mental Development, in press.
