プロジェクト紹介

目標8 研究開発プロジェクト(2021年度採択、2024年度終了)台風制御に必要な予測と監視に貢献する海の無人機開発JPMJMS2288
プロジェクトマネージャー(PM)森 修一海洋研究開発機構 地球環境部門大気海洋相互作用研究センター 上席研究員
概要
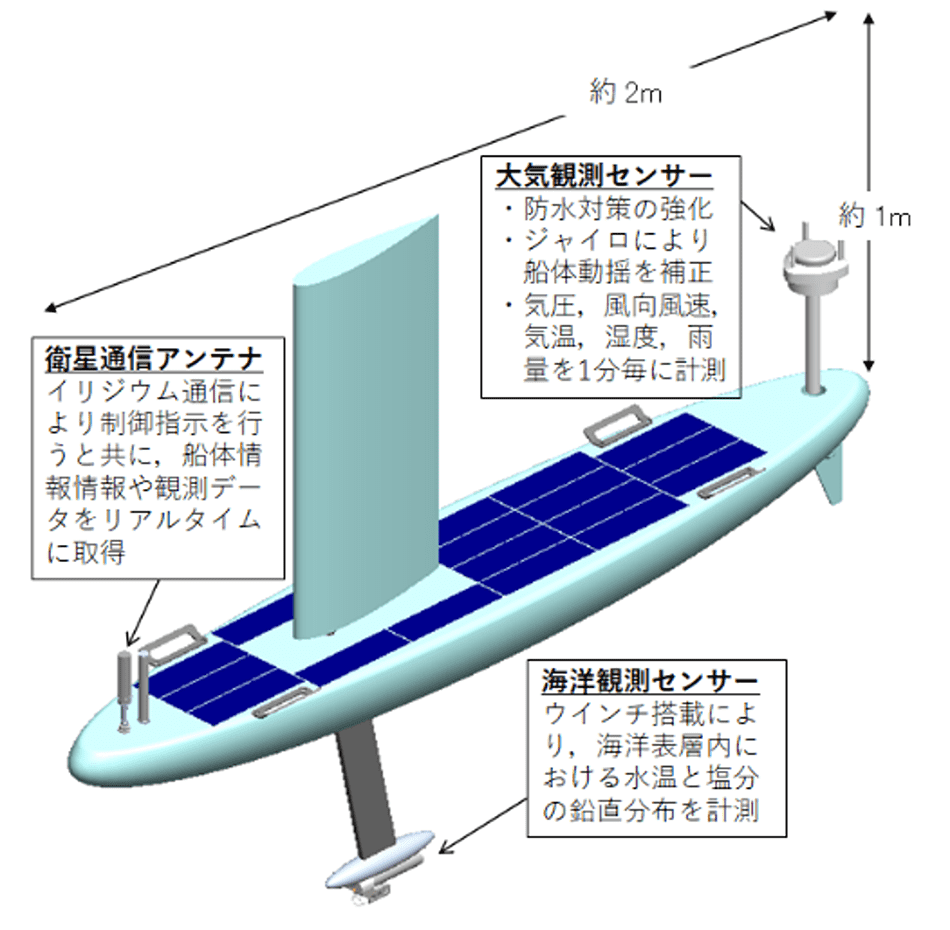
図1 VMドローン試作機の本体概要。今後の検証により仕様変更の可能性あり。
気象制御を実現するためには正確な予測が欠かせませんが、その予測に重要な入力データ(初期値)として現象の継続的な観測が必要です。特に台風については、その進路や強さ(中心気圧と最大風速)の「真値」が高い精度で求められます。しかしながら、台風中心付近の気圧や風速は現地で観測することが困難なため、衛星観測画像から一定の手順で「推定」しているのが現状であり、正確な台風予測を行うためのボトルネックとなっています。また、台風研究用の航空機観測も進められていますが、予算上の問題もあり全ての台風を継続的に監視することは困難です。このため本プロジェクトでは自律的に台風の中心周辺域を追跡可能な仮想係留(VirtualMooring)機能を持ち、台風の移動と共に強さの「真値」、および台風の発生発達に重要な海洋表層温度など、大気海洋データを継続的に取得できる海上無人観測機(VMドローン)を開発します。開発計画3年間の概要は次の通りです。
- 1年目(2022年):
- 船体の設計製作、観測センサ一類の改良の後、ラボ試験や試作機を用いた水槽試験、および国内沿岸域での機能試験を繰り返し行います。
- 2年目(2023年):
- 各試験結果に基づく各種改良の後、外洋上における衛星通信や船体制御、観測精度等を確認するため、海洋地球研究船「みらい」熱帯北西太平洋航海を用い、台風発生多発域であるフィリピン東方海上で短期(約1週間)外洋試験を行います。
- 3年目(2024年):
- 引き続き試験結果に基づく改良を続け、再び「みらい」 航海を利用した外洋試験を実施し、台風相当(最大風速≧17m/s)の強風波浪環境下における航行性能や自律制御(VM機能)、観測センサー精度、衛星通信機能等の確認を行います。
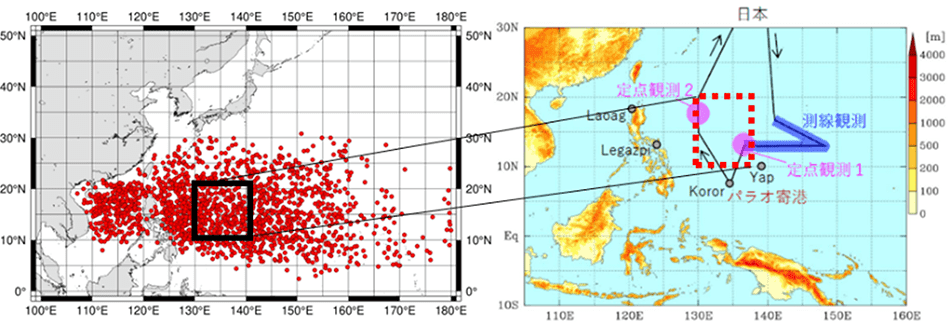
図2 気候学的な台風発生地点(赤丸、1951-2021年、デジタル台風*1より作成)(左図)。
海洋地球研究船「みらい」2023/2024年航海の予定航路とVMドローン外洋試験を行うフィリピン東方沖の定点候補海域(右図)。
*1 http://agora.ex.nii.ac.jp/digital-typhoon/reference/birthplace.html.ja
終了時(2024年)のマイルストーン
台風中心周辺域における海上気象と海洋表層を気象制御に必要な精度で継続監視可能な海上無人機(VMドローン)を開発します。
研究開発項目(クリックすると、それぞれの成果概要ページに遷移します)
課題推進者
| 研究開発項目[1] | 森 修一 | 海洋研究開発機構 地球環境部門大気海洋相互作用研究センター 上席研究員 |
|---|---|---|
| 研究開発項目[2] | 勝俣 昌己 | 海洋研究開発機構 地球環境部門大気海洋相互作用研究センター グループリーダー代理(主任研究員) |
| 研究開発項目[3] | 横井 覚 | 海洋研究開発機構 地球環境部門大気海洋相互作用研究センター グループリーダー(主任研究員) |
PDFダウンロード
- プロジェクト概要(358KB)
- 終了報告書(5.04MB)