成果概要
台風制御に必要な予測と監視に貢献する海の無人機開発[2] 強風雨波浪環境対応の大気海洋観測センサー群開発
2024年度までの進捗状況
1. 概要
VM(Virtual Mooring)ドローンに艤装した上で、台風中心付近における大きな船体動揺環境下でも十分な精度を保持し、かつ一時的な水没や大雨に対しても耐えうる防水機能を有する大気海洋観測センサー開発を行う研究開発項目です。観測センサー単体の技術開発はもちろんのこと、船体へ艤装後の運用試験が必須であるため、研究開発項目1とも緊密に連携しています。
初(2022)年度に大気観測センサー類の防水加工やラボ検定、水槽試験等を行った上で、本(2023)年度には海洋観測センサーも加えた国内沿岸海域試験を繰り返し行った後、VMドローン試作2号機に艤装し、海洋地球研究船「みらい」熱帯北西太平洋航海を用い、フィリピン東方沖における初の短期外洋試験を行ないました。
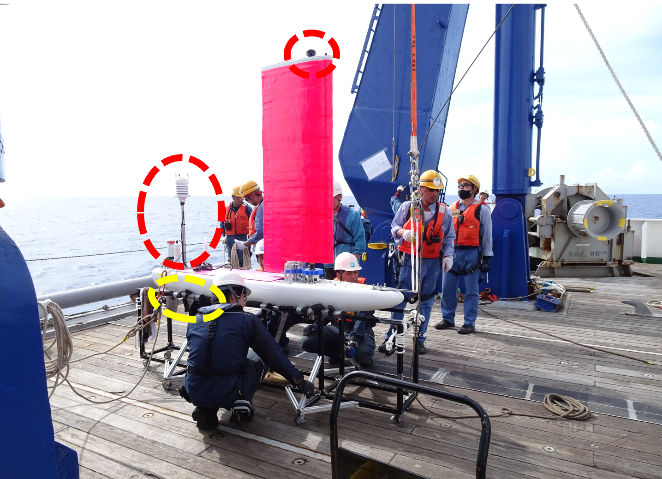
その上で、本(2024)年度は台風相当(風速>17m/s)の強風波浪環境での対候性能を確認するため、試作3号機に艤装し、ふたたび「みらい」を用いて秋季(10-11月)の西部北太平洋/ベーリング海の最終外洋試験を行いました。

2. これまでの主な成果
- ①2022年度には、大気海洋観測センサー群を試作1号機に艤装した上で国内沿岸試験を繰り返し、防水性能や船体動揺に伴う補正手法等の改良を行ないました。
- ②2023年度には、前年度試験に基づき改良したセンサー類を試作2号機に艤装し、海洋地球研究船「みらい」を用いて台風発生海域である夏季(6-7月)フィリピン東方沖にて初の外洋試験を行ないました。比較的静穏な環境であったものの、真値である「みらい」データ等と比較し十分な精度で観測していることが確認できました。
- ③2024年度には、台風相当(風速>17m/s)の強風波浪環境における大気海洋センサー類の対候性を示すため、さらに改良を進めたセンサー類を試作3号機に艤装した上で、最も強風波浪環境に遭遇する可能性の高い、秋季(10⁻11月)「みらい」西部北太平洋/ベーリング海航海で最終外洋試験を行いました。結果的には、強風波浪により横揺れ角70°に達するような横倒し状態でも、十分な精度で観測データを得ることができました。
3. 今後の展開
今後の開発課題としては、台風中周辺域における長期間観測であり、そのためにも沖縄など日本沿岸域から「自律的な帰港(回収)」を前提とした外洋試験が欠かせません。この大気海洋観測センサー群は、昨(2023)年度から経済安全保障重要技術育成プログラム(K Program)「海面から海底に至る空間の常時監視技術と海中音源自動識別技術の開発」にて開発する観測センサー類のベースモデルとして採用されており、民間企業との協業も検討されています。運用環境は全く異なるものの、技術的ベースを同一としたUSV用の大気海洋センサー類として、今後も連携協力体制を推進する予定です。