プロジェクト紹介

目標3 研究開発プロジェクト(2022年度採択、2025年度終了)月面探査/拠点構築のための自己再生型AIロボットJPMJMS223B
プロジェクトマネージャー(PM)吉田 和哉東北大学 大学院工学研究科 教授
概要
月面において未到探査および拠点構築を行う担い手として、再構成が可能なAIロボットシステムを提案し、その実現に向けた研究開発を行います。月面に持ち込んだ資材を有効活用し、ミッションや作業状況に応じてモジュールの組み換えにより形態変形し、変幻自在な自己再構成が可能なAIロボットの技術を確立します。それにより、2050年には月面での探査と資源活用が促進され、持続的な有人活動拠点の実現を目指します。開発された技術は、地球上の自然災害等にも応用できます。
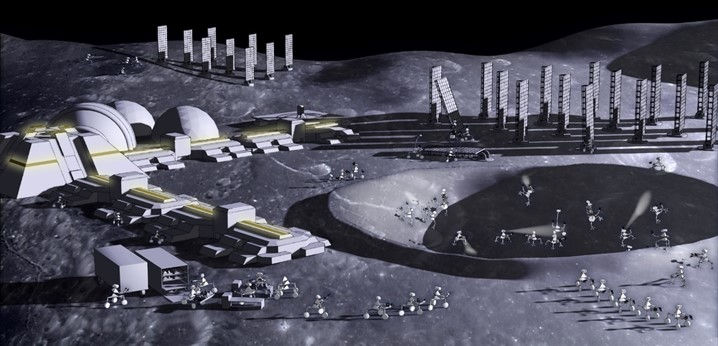
2050年におけるAIロボットによる月面活動拠点のイメージ
2030年までのマイルストーン
月面という特殊環境のもとで機能する「モジュラー型AIロボット」の宇宙フライトモデルを開発し、これらのロボットを用いた「AIロボットによる月面拠点の実現」に向けた、初期実証ミッションを月面上で実施することを目指します。
2025年までのマイルストーン
ロボットモジュールを自身あるいは他のロボットにより着脱・交換できること、移動環境に応じて適切な移動様式や形態を選択してモジュール組み換えを行い、ミッションを遂行できること、複数台のロボットを用いて障害物のある不整地上で大型の対象物を協調搬送し、構造物の展開・組立ができることなどを地上実証します。
研究開発の概要


課題推進者
| 研究開発項目[1] | 松野 文俊 | 大阪工業大学 工学部 電子情報システム工学科 特任教授 |
|---|---|---|
| 研究開発項目[1] | 森本 淳 | 京都大学 大学院情報学研究科 システム科学専攻 教授 |
| 研究開発項目[4] | 吉田 和哉 | 東北大学 大学院工学研究科 航空宇宙工学専攻 教授 |
| 研究開発項目[4] | 木村 真一 | 東京理科大学 創域理工学部 電気電子情報工学科 教授 |
| 研究開発項目[4] | 山野辺 夏樹 | 産業技術総合研究所 インダストリアルCPS研究センター 上級主任研究員 |
PDFダウンロード
- プロジェクト概要(276KB)
- 終了報告書(8.12 MB)