成果概要
月面探査/拠点構築のための自己再生型AIロボット[1] モジュラー・マルチエージェントなロボットシステム
2024年度までの進捗状況
1. 概要
宇宙空間への輸送機会や輸送可能な体積・質量には厳しい制約があるため、地球から持ち込むロボットシステムには、作業環境や目的の変化に応じて柔軟に形態を変えながら多様なタスクを遂行する「変幻自在な適応性」が求められます。さらに、異なる形態を持つ複数のロボットが協調して作業を進める能力も不可欠です。この課題に対する解決策として、本プロジェクトでは、真空・1/6重力・レゴリスに覆われ岩石が点在するような未知の過酷環境下においてもタスクを遂行可能な、再構成可能なモジュラーロボットシステムを開発し、異種ロボット群による分散協調制御の実現を目指しています。
2. これまでの主な成果
令和6年度は、以下の2つの課題を中心に研究開発を推進しました。

課題1:モジュラーロボットの設計、製作・機能解析
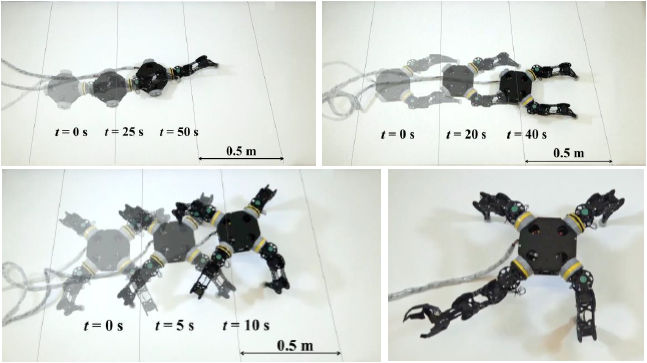
本プロジェクトの中核となる「変幻自在」にタスクを遂行可能なモジュラーロボットについて、その設計・試作・機能解析を行いました。段階的な地上実証モデルの開発を通じて、以下の成果を得ました。
- 構造と制御のレポジトリ構築:各モジュールの構成、形態、機能、および対応する制御手法をデータベース化し、再利用可能な知識基盤を整備。
- 結合機構の設計と製作:モジュールを容易に組み替え可能とする結合インターフェースを設計し、地上実証モデルを製作。
- 再構成アルゴリズムの開発:モジュールの組み替えに応じた構成認識とタスク割当を実現するアルゴリズムを開発し、ロボットモデルに実装。
- Plug and Play機構の開発:モジュールの接続・切断を動的に検知・管理する柔軟なシステムを構築。
- 自律分散協調制御系の構築:異種モジュラーロボット間で協調動作が可能となる制御系の設計と基礎実装を実施。

課題2: 階層型強化学習による分散型AIの研究開発
MoonBotのモデルファイルを基に、アーム・ハンド・移動モジュールを統合したロボットシステムのシミュレーション環境を構築し、月面でのロボットタスクを視野に入れたAI制御手法の研究を行いました。具体的には、以下の要素を持つ階層型強化学習システムを新たに設計・導出し、マニピュレーション課題への適用を行いました。
- 下位モジュール(下層学習):
- アーム制御モジュール(arm):手先を目標位置まで到達させるリーチ動作の学習。
- グリッパー制御モジュール(gripper):対象物を適切に把持する動作の学習。
- 移動ロボット制御モジュール(rover):所定位置への移動を行う動作の学習。
- 上位モジュール(上層学習):
- 上記の下位モジュールを活用し、作業位置までの移動、最適な角度への手先調整を含むタスク全体の統合的方策を学習。

この階層構造により、把持・移動・操作といった複合的な動作を効率的に習得することが可能となり、結果として所定位置への移動および与えられた操作タスクを成功裏に達成しました。一方、同様のタスクに対して階層構造を持たない従来の強化学習手法では、学習が進まずタスク達成に至らない結果となりました。
この成果により、提案するモジュラー構造と階層型強化学習を統合したAIシステムが、移動・マニピュレーションを含む複雑なタスクに対して有効かつ効率的な方策学習を可能とすることが実証されました。
3. 今後の展開
月面上でAIロボット群を用いて有人拠点などのインフラを自律的に構築するというムーンショット目標の達成に向けて、今後は、タスクに応じて柔軟に変化するロボット構成法、各ロボットへの最適なタスクアロケーション手法、さらに階層型学習に基づく動作スキルの獲得・蓄積・活用の方法について、引き続き研究を深化させていく予定です。