成果概要
月面探査/拠点構築のための自己再生型AIロボット[2] AIロボットによる月面拠点の実現
2024年度までの進捗状況
1. 概要
月面に運び込まれたモジュラー型ロボットの自己組立を出発点とし、月面拠点構築の代表的なインフラとして、太陽発電タワー、無線中継局、有人居住ユニットの3種類の構造物を対象に、AIロボットによる展開・組立・設置技術の研究開発を進めます。
ロボット自身、および太陽発電タワー・無線中継局といった構造物は、運搬の制約から分割または折りたたまれた「受動的」な要素として持ち込まれることを前提として、これらを、同一構造あるいは異なる構造を持つ複数のロボットが協調しながら展開・組立する工程を考えます。
有人居住ユニットのような大型構造物については、インフレータブル構造などを想定し、「能動的」に展開・変形する構成要素を利用した構築方法を検討します。
2. これまでの主な成果
開発した月面モジュラーロボットの地上実証機「MoonBot」を用い、JAXA宇宙探査実験棟内に設置された宇宙探査実験フィールドにおいて、月面拠点構築に必要となる各種ベンチマークタスクに対応した実証実験を実施しました。実験では、以下の3つのベンチマークタスクに取り組みました。
1. ベンチマーク・タスク1: モジュールの着脱・交換
ロボットが、自身の構成モジュール、あるいは他のロボットのモジュールを認識し、それらを着脱・交換する動作を自律的に実行。形態変更による機能適応の可能性を評価しました。
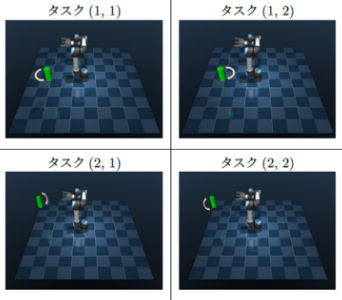
2. ベンチマーク・タスク2: 構造物の組立作業
太陽発電設備や無線通信局の構築を想定し、挿入・ラッチングといった組立作業を実現。テレオペレーション(遠隔制御)を出発点とし、組立手順および動作方策の学習に基づいた自律化に取り組みました。
3. ベンチマーク・タスク3: インフレータブル居住ユニットの展開支援
有人モジュールの構築としてHIDAS地上実証モデル(インフレータブル構造)の能動展開を検証。ユニット同士の位置決めおよび結合作業によって、ロボットと能動構造物の協働作業の実現可能性・有用性を確認しました。

課題1: 複数ロボットによる拠点構築の統合制御
拠点構築作業における複数ロボットの統合制御技術について、研究および実装を進めました。ロボット制御は、まず人による遠隔操作(テレオペレーション)を起点とし、最終的には自律的な作業遂行を目指しています。
その実現のために、シミュレーション環境を用いた作業計画の立案、個別ロボットに最適な制御方策を導出するためのデジタルツインの構築、強化学習を用いた自律制御方策の獲得、仮想環境で学習した方策を実ロボットに適用するSim2Real技術の開発を行いました。
これらを通じて、拠点構築に必要な複数ロボットの協調作業を実現するための基盤技術の整備を進めました。
課題2: インフレータブル構造を用いた有人拠点構築
2050年に月面に文明的な都市を築くためには、人類が居住可能な拠点の構築が不可欠です。本研究では、そのような月面での有人活動拠点の実現に向けて、ロボットとの協調によって自律的に構築されるインフレータブル構造物であるHIDAS(Homeostatic Inflatable Decentralized Autonomous Structure) の開発を目指しています。
2024年度はHIDASの変形・移動機能を実現すると共に、複数のHIDASとロボットとの相互協調によるHIDASの結合など居住空間拡張を目指し、HIDASと外界、及び、HIDAS相互の認知機能について研究を進めました。


課題3: インフレータブル構造物ロボット化に向けたシミュレーション基盤構築と制御学習
本課題では、HIDASのシミュレーション基盤および制御学習手法の開発に取り組んでいます。2024年度は、実機の計測データに基づいてモデルパラメータを調整可能なデータ同化機能を備えたシミュレーション基盤を構築し、HIDASの実際の挙動に近い動作再現を実現しました。また、各インフレータブルユニットにおける膨張・収縮動作を利用した回転移動の実現可能性について検証を行い、圧力制御により回転移動が達成可能であることを示しました。
3. 今後の展開
AIロボットによる月面拠点の実現を目指した自律性の高いロボットシステムの開発を、継続的に推進していきます。