成果概要
月面探査/拠点構築のための自己再生型AIロボット[3] 自己修復・再生可能なロボットのためのハードウェア
2023年度までの進捗状況
1. 概要
本研究開発項目では、月面を含む様々な現場でロボットが持続的な活動を行うことを可能とするために、現場での作業ニーズに応じたロボットの部品を、現場で調達される資源・素材を用いて製造できるOn-demand Robot Design, On-site Fabricationの技術を明らかにし、その場でロボットがロボット自身を修理・製造するための積層製造法 (Additive Manufacturing) を実現することを目標としています。加えて、月面での応用を見据え、製造技術の小型軽量化・省電力化についても詳細に検討します。素材として粉末状の素材(金属、セラミック、月模擬砂等)を用い、レーザービームあるいは電子ビームによる3次元焼結・溶融工程(3Dプリント技術)を発展させ、素材、製造法および製造された部品の強度との関係性を明らかにしたうえで、実用的な製造法の確立を目指します。
2. これまでの主な成果
本研究テーマでは、下記のとおり研究開発を実施しました。
課題1: 粉末素材によるオンデマンド・ロボット造形法の開発
(1)既存技術を用いた部品造形
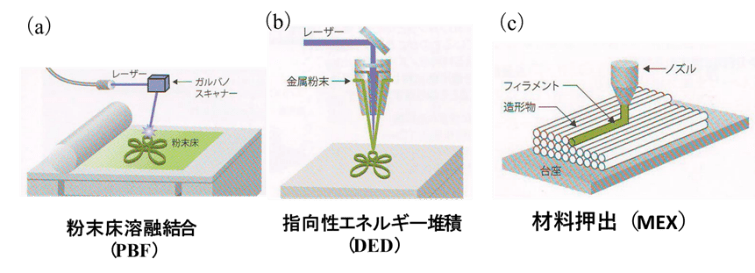
- a) 粉末床溶融結合方式の電子ビーム積層造形装置(PBF-EBM装置)(上図(a))による部品造形を行いました。
- 造形材料:純銅、TiAl合金
- 造形物形状:単純構造物(角棒)
- b) レーザー熱源指向性エネルギー堆積法(DED装置)(図1(b))による部品造形を行いました。
- 造形材料:Ti6Al4V合金
- 造形物形状:ラインスキャン、壁
- c) 材料押し出し法(MEX 装置)(図 1(c))による部品造形
- 造形材料:ステンレス粉末(フィラメント)およびアルミナ
- 造形物形状:単純構造物(棒状、板状、丸棒のテストピース)および複雑構造物(ギア、アーム、筐体)
(2)月面環境を考慮したPBF-EBMプロセスの最適化検討
純銅粉およびTi-6Al-4V粉末の挙動を調べるための装置を新たに製作しました。新しい粉末広がり装置は、高速度カメラを用いた粒子画像流速測定法(PIV)を行うために開発しました。 これを通じて純銅及びTi-6Al-4V合金の個別粒子の速度及び変位を計測することで、粉末広がりメカニズムを明らかにし、また、製作された粉末広がり装置を利用して多様な粉末の動的安息角および広がり性を分析しました。
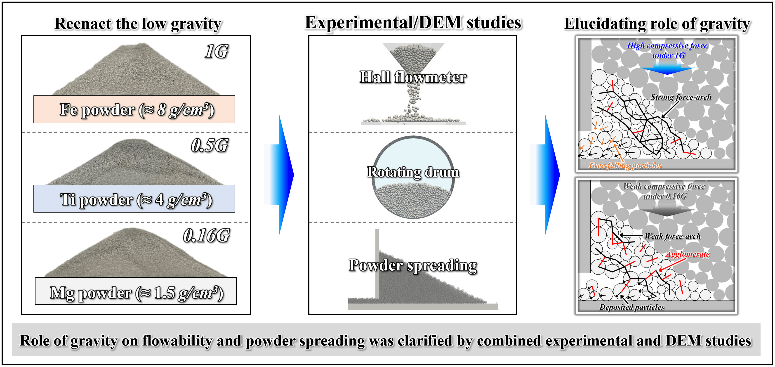
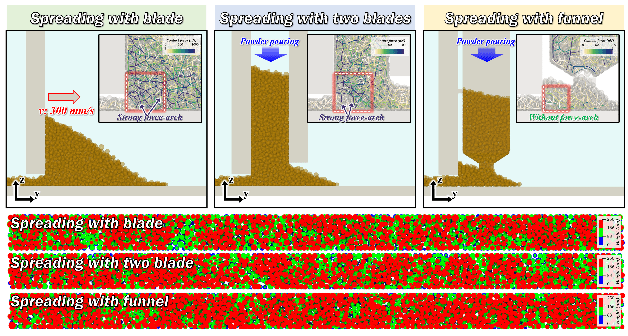
また、各粉末による静的/動的粉体流動性評価のためにホールフロメータ/回転ドラム試験装置を開発しました。 月面で想定される低重力環境の低い圧縮条件を模写するために多様な比重の粉末を利用して粉末の流動性および広がり挙動を調査しました。 また、各粉末の電気的特性を直流および交流インピーダンス実験を通じて調査し、静電気力が粉末の流動性および広がり挙動に及ぼす影響を明らかにしました。 これを通じて粉末の流動性および粉末広がり挙動に及ぼす低重力の影響を、現場観察結果を基盤に明らかにしました。粉末広がりで、低重力環境で粉末層特性を決定する主要要因を調査するためにDEMシミュレーションモデルを開発しました。 これにより、粉末の凝集力は低重力下で広がる挙動及び粉末層の特性を決定する主要因子であることを明らかにしました。 また、開発されたDEMモデルを基盤に低重力のための代案的な粉末広がり技術を開発しました。
(3)月面環境を考慮したDEDプロセスの最適化検討
DED(指向性エネルギー堆積法)プロセスにおける粉体の自由落下による粉末原料供給の有効性を検討するため、ホールフロー式粉末供給システムの開発を行いました。 SUS304粉末の流量は,ホールフロメータの振動数によって大きく影響を受けることを確認しました。 高い振動数の場合、粒子の摩擦帯電による静電気力増加で凝集体を形成する傾向を見せることを明らかにしました。したがって、粉末の比重が減少することによって凝集体形成は増加する可能性があることを明らかにしました。 また、振動数による流量を調査してホールフロー式粉末供給のための最適振動数を明らかにしました。 DEMシミュレーションモデルは、ホールフロー式粉末供給装置の振動数による個別粒子の挙動を調査するために開発されました。 低い振動数で粉末粒子の移動は活性化された粒子Jammingによって抑制されることを確認しました。 反面、増加した振動数で一時空隙形成の増加は粒子流量を増加させることができることを明らかにしました。