成果概要
未知未踏領域における拠点建築のための集団共有知能をもつ進化型ロボット群[1] 進化型ネットワーク知能システム
2024年度までの進捗状況
1. 概要
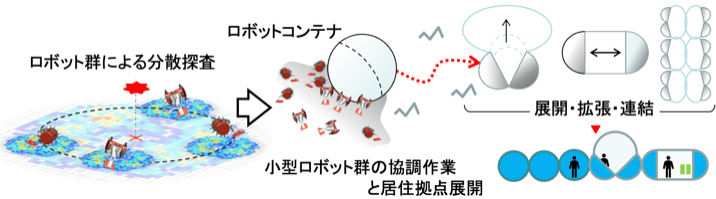
この研究開発項目では、複数の低機能・低コストな小型ロボットで形成した群を誘導する技術を開発し、自ら役割分担、組織を作り、作業を実現することを目指します。
各ロボットは最低限の制御情報から確率行動と群形成を両立させ群として探査などを実現します。ロボット間通信ネットワークを介して共有AI機能を生成し、取得センサ情報を分析、意味を理解し、群の組織編成や役割分担などの協調行動のための自律行動戦略を決定します。そして、複数の群が得た情報で群の協力戦略などにより、さらに大きな群システムとして行動戦略を決定可能にします。これらの多様なレベルの行動戦略を決めるために、群のネットワーク上に分散型ソフトウェア実行機能を開発し、「ネットワーク知能」として構築します。このネットワーク知能が小型ロボット群を自己組織化し、自律的に行動戦略を生成することで、様々な自律協調作業を実現します。各群や群集団は地形や通信の状況による孤立と出会いにより、各々に活動できる柔軟な協力関係と個別の成長と進化が実現されます。その結果、超難環境において消耗と追加によるロボットの世代交代を乗り越えて、人間が介在せず難環境を探査や作業することを可能にします。
最終的には、これらを研究開発項目2で開発する進化機能、同3で開発するロボットおよびコンテナと統合し、ロボット群による自律的な探査と活動拠点の構築を実現する「進化型ネットワーク知能システム」として実現します。
2. これまでの主な成果
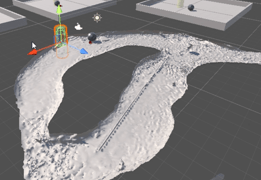
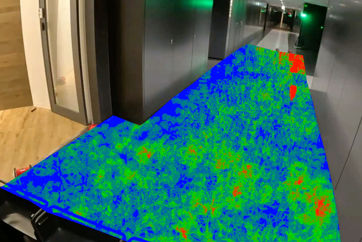
未知の領域では空間の形状もわかりません。そこではまず、様々で複雑な未知の空間を小型ロボットが認識し、それにもとづいて行動できる必要があります。そのため群の形成と探査行動を両立させ、30台以上のロボットが群として移動探査できることを確認しました。様々な形状の領域が細い回廊などで2つ以上連結した空間で、小型ロボットの群が次の領域に向かって自律的に移動可能です。群が現在いる領域から次の領域へ移動では、その移動条件として領域網羅率を設定し、今いる領域でそれをクリアすると次の領域に向かうアルゴリズムにより実現されています。また接続領域が狭いなどで群の移動開始の判断が難しい条件でも、その環境に適したサイズの群を自律的に形成し、群を誘導できると確認しました。またロボットの行動情報から領域網羅率推定と路面状態推定、自律的な行き詰り回避、跳躍判断などの研究と試験も進めました。さらにAI学習による群の編成と目的地誘導、コンテナの搬送などの検討もシミュレーションにより検証を行いました。

3. 今後の展開
ロボットが自律的に群を構成し、群として誘導制御されることで、指定した領域内を調査しながら目的地へ到達できるようにします。そのために、知能システムの安定性とロバスト性を向上させ、実際の探査の環境で必要な様々な機能を管理運用するシステムとして「進化型ネットワーク知能システム」の研究開発を引き続き行います。
まず、それぞれのロボットからの観測データを、サーバに収集します。このデータには、探査する環境の観測情報、ロボット個体や群の存在位置と行動情報などを含みます。これらの情報は、未知の探査空間での曖昧な位置情報とひもづいた観測データとなります。あいまい情報による情報整理や違和感解析による抽象化の手法を研究開発し、AI機能への情報入力を可能にし、ロボット個体や群の行動計画を可能にします。
ネットワークAIの機能では、個体の自律的な群分け(自己組織化)、自律的な群の誘導、自律的な群の役割分担などを通信や電力供給に制限がある状況でも実現します、これらの機能は、実際の環境で事前実験ができない月面の溶岩チューブの探査で必要になるため、新たに構築していく仮想環境シミュレータを用いて確認していきます。
そして、これらを統合し、群ロボットが自律的な協調行動を実現する初期の「進化型ネットワーク知能システム」を実現します。さらに成果を用いて、月面洞窟探査を検討し、実際の探査ミッションに向けた開発を実施します。