成果概要
活力ある社会を創る適応自在AIロボット群[1] 人・ロボット共進化AI開発
2024年度までの進捗状況
1. 概要
本研究テーマでは、過剰な支援を行わず人の残存・潜在能力を活かし、あくまでヒトが自ら行動することを促すAIロボットのふるまいを設計することを目的としている。利用者に「このロボットがいれば自分でできる」と感じさせて主体的な行動を誘発するとともに、最終的には「このロボットがいなくても自分でできる」と思わせ、様々なことに挑戦する活力を創造する。
その目的のために『自己効力感』という、自分の行動に対する可能性の認知(主観)に着目し研究を進め、個人の自己効力感を向上させ、様々な動作・タスクに挑戦することを促すAIロボットを開発する。
介護現場での実証に向けた取り組みを加速させるため、本研究開発項目は下図の研究開発全体統合ビジョンにおける生活訓練・リハビリテーション分野を注力する。
2. これまでの主な成果
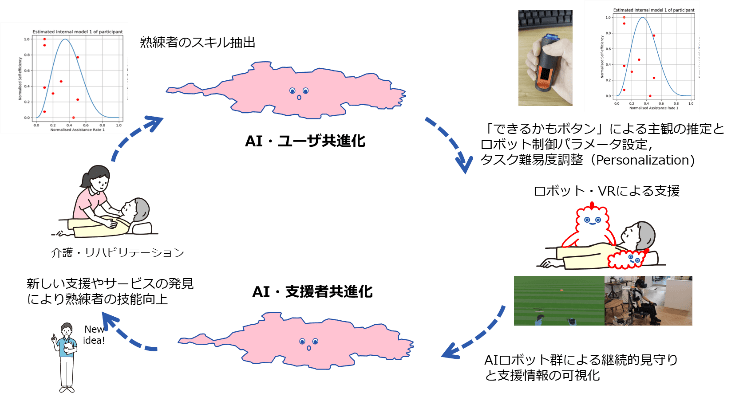
本研究開発項目では、社会実装AIシミュレータから得られる最適な戦略と支援パラメータを受け取り、それに基づいて適応自在AIロボット(Nimbus Robots)の制御パラメータを動的に変更するフレームワークを開発した。このフレームワークの確立により、個人の現在の状態や目標に合致しパーソナライズされたロボットの振る舞いが実現可能となった。これにより、ロボットは単なるツールの域を超え、ユーザー一人ひとりのニーズにきめ細やかに寄り添う存在へと進化することが期待される。
特に、生活訓練やリハビリテーションの分野において、この技術は革新をもたらしている。訓練者の主観的な感覚や意欲を直接フィードバックできる「できるかもボタン」を導入し、さらに最先端のVR/ARシステムとNimbus Robotsによる物理支援を統合することで、訓練者が自らの手で成功体験(時には学びとなる失敗体験も含む)を能動的に創出できるシステムを構築した。この複合的なアプローチにより、単なる身体機能の回復や向上に留まらず、訓練者の内発的な意欲や自己効力感を飛躍的に高めることを目指している。ユーザーは、まるでゲームのように楽しみながら、自身の限界に挑戦し、達成感を味わうことで、より積極的かつ継続的にリハビリに取り組むことができるようになる。
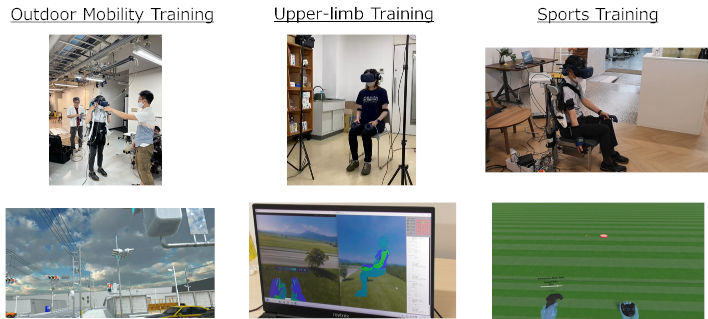
現在、このシステムの開発は上肢支援が先行しており、その効果はすでに複数の実証実験で明確に示されている。しかし、私たちの研究はこれに留まらず、歩行支援や離床支援を目的としたロボットおよびVRシステムの開発も既に完了しており、その応用範囲は着実に拡大している。これらのシステムは、難易度調整機能(ロボットおよびVRの両方で調整可能)、前述の主観評価機能(できるかもボタン)、そして動作の可視化・分析に基づく詳細なフィードバックといった、複数の高度な要素技術を統合することで、より効果的かつ効率的な訓練・リハビリテーションを可能にしている。これにより、ユーザーは自身の身体能力や目標に応じて、常に最適なレベルの支援を受けながら、主体的に訓練に取り組み、自身の可能性を最大限に引き出すことが可能となる。
さらに、開発されたこれらのシステムは、実際の介護施設等での検証が開始されており、現場での有用性と課題の抽出を進めている。
3. 今後の展開
今後は、上肢支援・下肢支援の両側面において、これまで培ってきた各種要素技術のさらなる統合を推進していく。具体的には、難易度調整、主観評価フィードバック、動作可視化・分析といったコア技術を、よりシームレスに連携させることで、システムの汎用性を高める。これにより、限定的な訓練環境に留まらず、生活訓練やリハビリテーションに関する多様な訓練タスクへと本システムを適用できるよう、その一般化を進めていく。この広範な適用能力の獲得は、より多くのユーザーの多様なニーズに対応することを可能にし、ひいては適応自在AIロボットによる支援の可能性を大きく広げるものとなる。