成果概要
人とAIロボットの創造的共進化によるサイエンス開拓[1] 要領よく発見への最短距離を導く熟練AIロボット科学者
2024年度までの進捗状況
1. 概要

優れた科学者は、鼻が利いて要領がよく、手先も器用で、熟練学者でも困難な精密実験を次々と成功させます。そのような科学探究を可能にする熟練AIロボット科学者に必要な能力を開発します。
- AIが多様な知見を横断して有望な仮説を導出。さらに実験結果を自ら解釈して仮説を洗練していく。
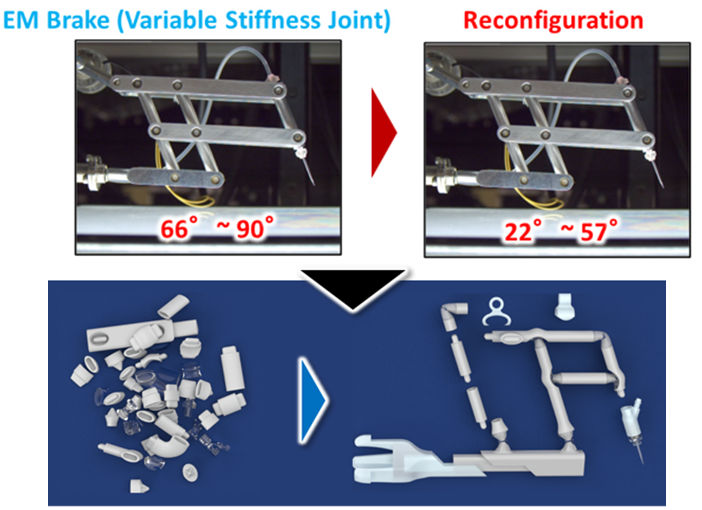
- ロボットは、熟練科学者でも難しい精密実験を確実に成功させる。
- 本質的な試行錯誤に集中し、要領よく効率的に発見へと到達する。
2. これまでの主な成果
ライフサイエンス分野では、実験のサンプル数が少なく、仮説構築が難しいため、場当たり的な仮説が立てられることがあります。また、顕微鏡下で微細なモデル生物(アフリカツメガエル、シロイヌナズナ、マウスなど)の組織や細胞に対して詳細な観察を行ったり、精密かつ複雑な作業を行ったりする必要があり、熟練の科学者でも失敗してしまう場合もあります。
そこで、科学AIによって有望な仮説を立て、ロボットによって精密実験を実施し、科学AIによって解析して自動で実験レポートを作成し、仮説を洗練していく方法を開発しています。

これまでに、様々な種類のデータから有望な仮説を提案する科学AI、熟練者にも困難な精密実験を可能にするロボット、微細な構造を解析して自動で実験レポートを作成する科学AIを開発してきました。
具体的な科学探究として、農薬に代わる植物の「薬」を例として開発した技術を統合して実証してきました。このテーマでは、気孔の開閉を制御する薬を開発し、植物を環境変化に強くすることを目指しています(魚住PI)。
まず、科学AIが化合物構造式や学術文献のデータベースから、有力な化合物の仮説を提案し(竹内PI、笹野PI)、実際にその化合物を合成します(有澤PI)。つぎにロボットにより、その化合物の性能を自動で計測します(新井PI)。大量の気孔の開口度も自動計測され、その結果を科学AIが自動レポートとして出力します。(森PI)。
これまでに、人間の科学者よりも要領よく有望な仮説を提案できること、圧倒的に早く解析できることを示してきました。また、実験時間や実験の質(リーク電流で示されるノイズ)は、初心者を凌駕し、熟練者をも超えることを示してきました。

3. 今後の展開
細胞レベルでは、植物と動物の類似点も大きく、同じ科学AIやロボットをヒトの薬の探索にも応用しようとしています。これまでに科学者が見つけた化合物よりも薬としての性能が優れた化合物も発見してきました(有澤PI、他)。また、遺伝子制御ネットワークの仮説を立てる科学AIも開発しています(神谷PI、武部PI、丸山PI、谷村PI、他)。
また、植物の培地における栄養の組み合わせの探究にも応用しており、科学者が見つけた培地よりも根の成長を促進する培地も発見しています(竹内PI、佐藤PI、他)。

このように、要素技術として世界トップの技術を開発しつつも、様々な応用分野における社会実装につなげていきます。