成果概要
サイバネティック・アバターのインタラクティブな遠隔操作を持続させる信頼性確保基盤[6] 通信困難環境における確率的信頼性確保通信技術
2024年度までの進捗状況
1. 概要
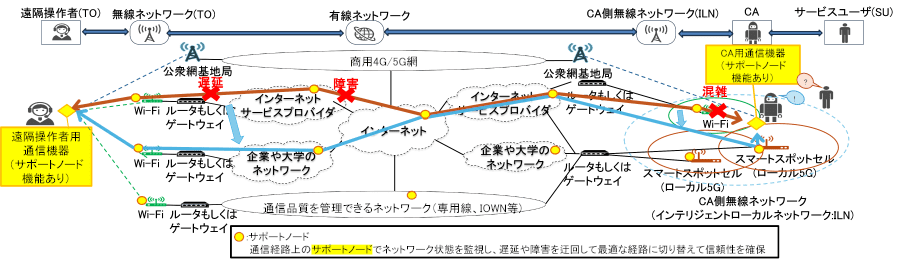
視認が難しく、電波の遮蔽効果も大きい体内や水中・海中などの通信困難環境におけるCAの通信方式を検討します。生体内CAのプロジェクトと連携し、将来的に確率的に信頼性を確保する通信を実現するため、体内外通信の品質変動や不安定要因を把握し、通信成立条件や通信要求条件の整理を通じて、確率的遠隔制御の成立条件を導くための基礎研究を開始します。ユースケースとして、数百万の体内CAのうち数体を機械CAとして確率的に選択し、それらにトリガを与えることで体内CA群を制御する手法などの適用を想定しています。機械CAが体外または体表に近い体内に設置される場合は、スマートスポットセルとの直接通信によりデータ送受信を行い、体内深部に設置される場合は、別途設置した体外通信機を介して通信を行います。通信量は、体内CAの種類やアプリケーションにより異なります。本研究開発項目では、図1のようなネットワークを想定しながら、このような確率的に選択された体内CAに対する遠隔制御通信の信頼性を確保する技術の開発を行います。体内CAの開発を担当する新井プロジェクトの進捗を踏まえ、対応する信頼性確保基盤を構築します。
2. これまでの主な成果
本年度は、生体内通信技術の研究動向を調査し、各種通信媒体を想定した研究事例を整理しました。多くは開発段階に至っていませんが、実用化またはそれに近い事例として、ミリメートルスケール以上の飲み込み型温度計や内視鏡などの製品化事例も取りまとめました。
通信成立の確率は、要求条件、電力供給方法、デバイスサイズ等に強く依存し、一般的な指標の策定は困難です。そこで、具体例として新井プロジェクトが開発したカプセル型体内CAを対象に指標の検討を行いました。仮定した通信要求に基づいて回線設計を行い、同CAの放射特性測定結果を基にして解析を実施しました。飲み込まれたカプセルの体内位置により、カプセルと体表面アンテナとの距離や向きが変化し、それによる受信電力の変動を考慮して、距離変化に伴う受信確率の変化を算出しました(図2)。人体組織内の減衰は、IT’IS のデータベース [1]に基づき、組織の比誘電率および導電率から推定しました。また、人体ファントムとSAR(Specific Absorption Rate)評価液剤を用いた計測の準備も進めました。これらを用いた測定は令和7年度に実施します。
[1] https://itis.swiss/virtual-population/tissue-properties/database/dielectric-properties/

3. 今後の展開
通信困難な体内CAの高信頼な制御を実現するため、通信技術及び確率的・統計的データ通信に基づく検査・診断等の実応用アプリケーションに関する調査検討を継続します。あわせて、体内外の通信環境の変動を確率的モデルとして与え、複数のアプリケーションで策定された指標を満足する通信条件を明らかにします。新井プロジェクトと連携し、カプセル型体内CAを前提に、体内外の模擬環境における電波伝搬測定実験を実施します。その結果をもとに、角度や位置によって変化する通信品質を確率的に表現する電波伝搬モデルを開発し、それを適用した通信方式の開発に取り組みます。通信試験により、その方式で通信が成立することを確認します。さらに、次世代の生体内CAに向けた無線通信技術の基礎研究として、内視鏡CAの通信実装技術を共同で開発し、実用性の高い生体内CAの実現を目指します。