成果概要
サイバネティック・アバターのインタラクティブな遠隔操作を持続させる信頼性確保基盤[4] ソシオCA無線通信環境の最適化技術
2024年度までの進捗状況
1. 概要
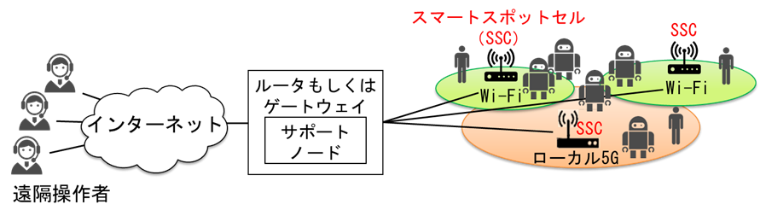
高信頼かつ安定したソシオCAの遠隔操作を継続可能とするため、無線通信環境の最適化技術に関する研究開発を進めています。具体的には、ローカル5GやWi-Fiなどで構成されたスマートスポットセル(SSC)を複数連携させ、これらを動的に制御するインテリジェントローカルネットワーク(ILN・図1)を構築し、CA通信の無線接続や通信エリアを最適な状態に保ち、途切れにくく高品質なソシオCAの無線遠隔操作を実現することを目指しています。
2. これまでの主な成果
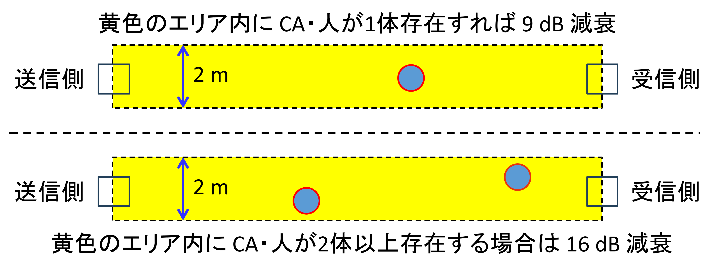
Wi-Fiやローカル5G基地局で構成するILN環境下で、多数のCAを遠隔操作する際の通信品質を事前に評価可能とするソシオCA無線通信信頼性評価シミュレータを開発しました(図2)。静止物体による反射と人体・CAなどの移動体による遮蔽の影響を分離してシミュレーションすることで、電波伝搬シミュレーションの演算負荷低減を実現しました。これにより、100体規模のCAが活動するエリアにおけるWi-Fiアクセスポイントやローカル5G基地局の最適な台数と配置を事前に評価でき、CAの要求通信品質を満たすネットワーク設計が可能となりました。
さらに、SSCで異種無線システム間の通信切替に対応したCA端末を開発しました(図3)。また、基地局・端末の性能を最大限に活かすため、各通信ノードとCAの通信状態を把握・蓄積できるOptimal CA Communication Area Computing Database (OCAC DB)を開発しました。 蓄積された情報をもとに、Deep Neural Network(DNN)により通信品質のモデリングと推定を行い、既存の無線設備の性能を最大限に引き出す設定パラメータを導出する技術「NeuroRAT」を開発しました(図4)。前述のシミュレータ上で、状況に応じた通信品質データをDNNに学習させ、実環境に適用することで最適な通信パラメータ選択を実現しています。また、MIMO技術により送信ビームの指向性制御が可能な5G基地局において、CAの移動に即応するビーム形成アルゴリズムを提案しました(IEEE Trans. Quantum Engineeringなどに採録)。


3. 今後の展開
これまでに開発したソシオCA無線通信信頼性評価シミュレータ、基地局、端末、OCAC DB、および、NeuroRATのアルゴリズムを連携動作させることにより、数十台規模のCA無線通信を最適化し、安定したソシオCA遠隔操作の実証を目指しています。