研究代表者

浦 環
九州工業大学 社会ロボット具現化センター
特別教授
研究概要
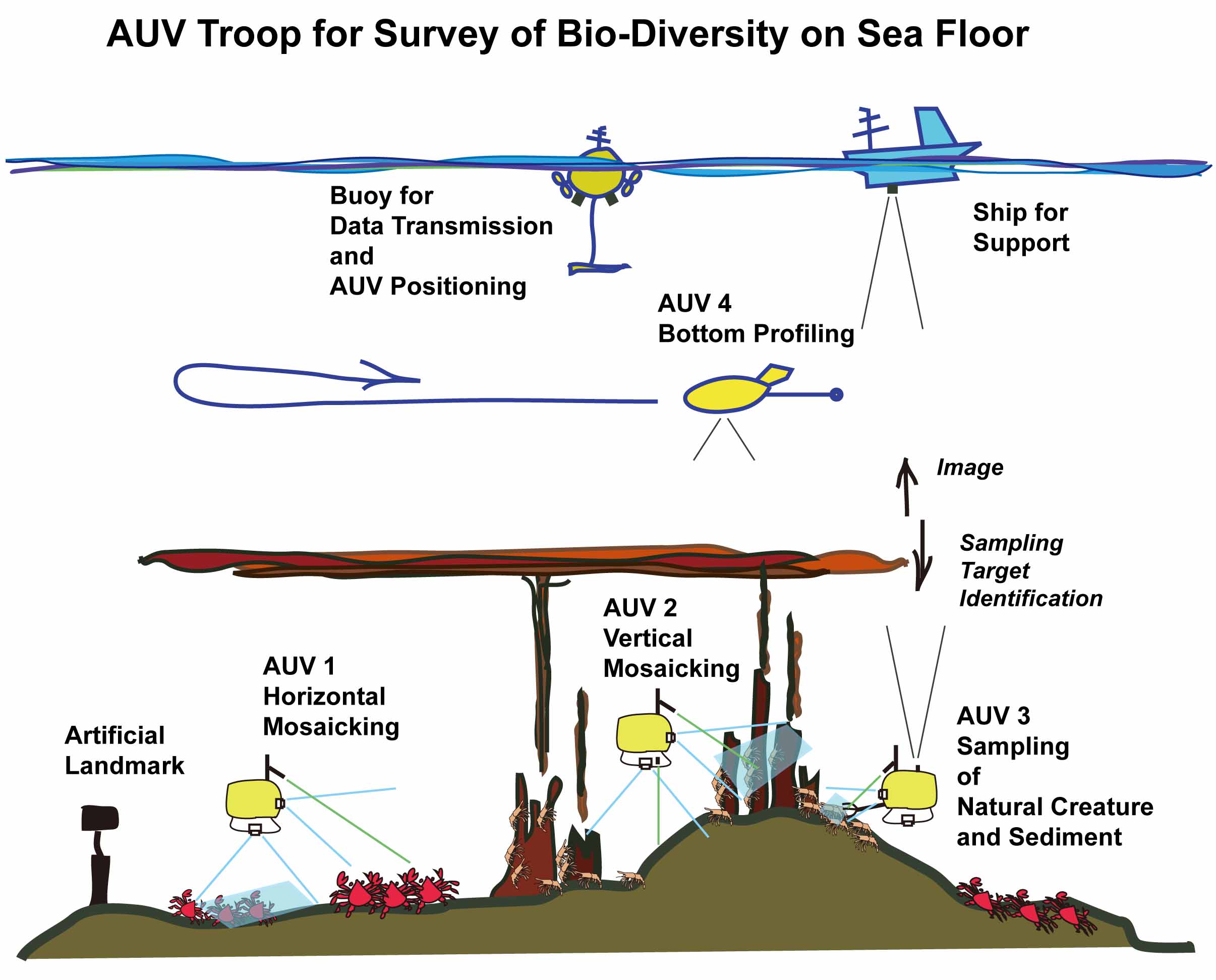
本研究では、海底や海底近くに棲息する水産資源、熱水地帯やガスハイドレート地帯など深海のオアシスと呼 ばれる場所の特殊な生態系を観測し、生物多様性を把握し、その変動の予測を可能にすることを目的として、100mx100m以上の広い海底面をcm以下の 精度と数cmの水平分解能でマッピングする、さらにmmオーダーの分解能を持つスチル写真をそれに重ねて、三次元的な広がりを四次元的に明らかにする、熱水地帯のプランクトンの採取や海底の特定の生物あるいは周辺環境をなす海底土等のサンプリングを行う、などの多彩なミッションを分担して行う高機能の自律型海中ロボット(AUV)を各種開発します。そして、AUV観測部隊を編成して鳩間海丘や鹿児島湾などに展開し、熱水地帯などの特殊な環境を時間変動を含め多面的に捕らえる新たな観測手法を実現します。ここでの観測結果をフィードバックすることでAUV機能をさらに向上させて、生物および生態観測の新たな 世界を構築します。
主たる共同研究者
| 石井 和男 | 九州工業大学 大学院生命体工学研究科 教授 |
| Dhugal Lindsay | 海洋研究開発機構 海底資源研究開発センター 主任技術研究員 |
| 沖野 郷子 | 東京大学 大気海洋研究所 教授 |
| 浅田 昭 | 東京大学 生産技術研究所 教授 |
