Research Director: Dr. Hiroaki Kitano
(Senior Researcher, Sony Computer Science Laboratories Inc.)
Research Term: 1998-2003
The biological phenomenon consists of ingenious interactions between a large numbers of diverse components. In stead of recognizing these systems as mere complex systems, we consider them as “symbiotic systems” and have carried out research on how to understand such systems. Our research has been made at two levels: systems biology to carry out research on cellular and developmental systems, and symbiotic intelligence to aim at engineering and industrial applications of the research at intelligence and behavior-levels. This research has resulted in a significant contribution to the rise of a new scientific field, systems biology, where several technologically and theoretically important paradigms such as Systems Biology Markup Language (SBML) and an array of theoretical and experimental lines of research concerning robustness have been established.
In the field of symbiotic intelligence, we have established advanced technologies for humanoid robots such as understanding of auditory scenes and integration of multimodel sensory information, as well as having created a specific field, robot design, and stride toward commercialization of robots. As a result, two robot ventures spun out, are incorporated from our projects, and have taken a favorable turn.
Research Results
(1) Systems Biology
We advocate a new field, systems biology, and have carried out successive research and promotional activities to contribute substantially to the building of this field.
(2) Development of Basic Software for Systems Biology (Fig. 1)
We have developed Systems Biology Workbench (SBW), necessary for research into systems biology in series, and Systems Biology Markup Language (SBML). SBML has become a virtual standard for the field, and has already been adopted in many kinds of software. SBW is a workbench that links plural GUIs, numerical simulation engines and analysis modules organically with each other. It has rapidly come to be highly appreciated, and corresponding software is on the increase.
(3) Development of Automatic Analysis System for Nematode Cell Lineage (Fig. 2)
We have developed a system for automatic recognition and utilization of information on cell lineage of C. elegans development. The process, which used to take an enormously long time, has been automated to allow completion within several hours. This system has higher quantitative and wider coverage abilities such as to eliminate overlooking of phenotype as well as to enable us to identify statistically its significant differences. This is expected to provide the methodology of developmental biology with a large change in paradigm. This research has been taken over by the JST BIRD ONAMI project.
(4) Robustness in biological systems
We have carried out analysis on the robustness of cell cycle, circadian rhythm, chemotaxis of bacteria coliform and pheromone response of yeast. As a result, several theoretical mechanisms realizing robustness have been identified, which has developed into an approach to control robustness systems to be intentionally controlled. Based on this work, research into biological robustness theory continues to develop.
(5) Robot Design and OpenPINO (Fig. 3)
In order to succeed in robot commercialization, it is important to popularize its technological base, produce diverse ideas, and to establish designs acceptable to consumers and clients. However, these important factors have attracted little attention. Accordingly, we have undertaken activities for promotion of robot commercialization including research into industrial robot design and disclosure of technological information on simple humanoids. As a result, robot design has been established as a new field and is recognized publicly to the extent of having been invited to exhibitions at the Venice Biennale and the Museum of Modern Art, New York. The disclosed technological information has been utilized by many enterprises, researchers, and educational institutions. In addition, two venture businesses emerged from our projects spun out.
(6) Humanoid Perception (Fig. 4)
We have developed technologies for self-moving humanoid robots to separate plural acoustic sources and discriminate between concurrent speech of plural speakers based on the understanding of acoustical environment and amalgamation of sight, acoustic sense and movement. We have also established the basic technology for a measure to actualize these functions in a room having unknown acoustic characteristics.
(7) Development of Small-size, High-performance “morph” Humanoid (Fig. 5)
In order to develop devices and basic technologies necessary for robots, we have developed “morph”, a small-size humanoid, in cooperation with device and semi-conductor manufacturers. morph is a two-legged walking humanoid robot which has more than 120 sensors buried in its overall body and which makes systemically synchronized movements in accordance with a high-performance CPU network. These devices from joint-development have already been put on the market contributing to progress in the field.
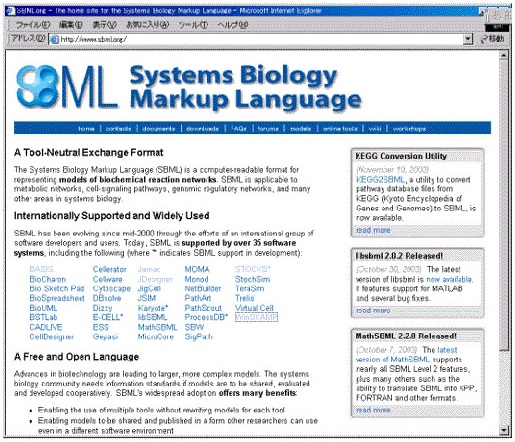
Fig. 1: Website of Systems Biology Markup Language
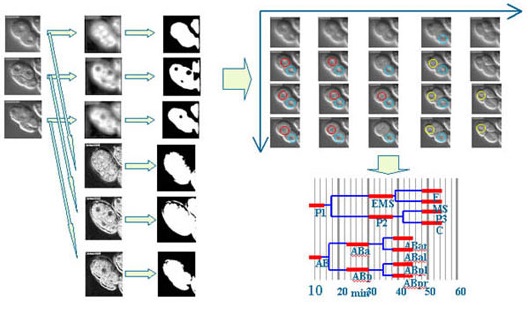
Fig. 2: An automatic reconstruction of cell lineage for C. elegans

Fig. 3: Humanoid Robot PINO
Fig. 4: Humanoid Robot SIG

Fig. 5: Humanoid Robot morph
