- JST トップ
- /
- 戦略的創造研究推進事業
- /
 ERATO
ERATO- /
- 研究領域の紹介/
- 終了領域/
- 北野共生システムプロジェクト
北野共生システムプロジェクト
総括責任者 北野 宏明
((株)ソニーコンピュータサイエンス研究所 取締役副所長)
研究期間:1998年10月~2003年9月
生命現象は、多くの多様性をもった構成物の巧妙な相互作用から成り立っている。このような系を、単なる複雑系ではなく、各々の要素の「共生系」と捉え、その理解方法の探求を行った。これを、細胞や個体発生のレベルで探求するシステムバイオロジーと、知能・行動レベルでその工学応用・産業展開を目指した共生系知能の二つの方向で研究を行った。その結果、システムバイオロジーという新たな学問分野の勃興に大きな貢献をし、その中でモデル表現言語SBMLやロバストネスに関する一連の理論・実験研究など、幾つかの重要な技術的・理論的枠組みを確立した。これらの成果はこの分野が急速に発展する源となりつつある。共生系知能の分野では、人間型ロボットにおける音環境理解や複数感覚融合などの先端的技術を確立すると共に、ロボットデザインという分野を開拓し、商業化への道筋をつけた。この結果、プロジェクトのスピンアウトとして、ロボット・ベンチャーが2社誕生し順調に成長している。
成果
表題
システムバイオロジーという新たな分野を提唱し、一連の研究、普及活動を行い、この分野の立ち上げに大きな貢献をした。
システムバイオロジーの提唱
システムバイオロジーの研究に必要な一連のソフトウエア基盤(SBW)、モデル表現標準言語(SBML)などの開発を行った。SBMLは、この分野での事実上の標準となり、多くのソフトウエアで既に採用されている。SBWは、複数のGUI、数値計算エンジン、解析モジュールを有機的に連動させる枠組みであり、現在、急速にその価値が認められ、対応ソフトウエアが増えている。
システムバイオロジー基盤ソフトウエアの開発(図1)
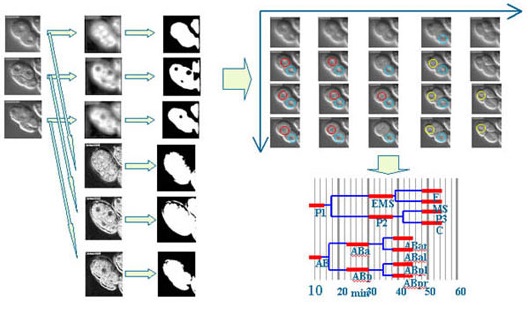
線虫の発生過程での各細胞の分裂や位置情報を自動的に認識し、データ化するシステムを開発した。従来、膨大な時間がかかっていた作業が、自動化され数時間で可能となった。また、定量性・網羅性が高まり、表現形の見逃しが無くなると共に、その有意な違いが統計的に確定できるようになった。発生生物学の方法論に、大きなパラダイムの変化を与えることが期待される。本研究は、JST BIRD大浪プロジェクトに引き継がれている。
線虫発生系譜自動解析システムの開発(図2)
細胞周期、概日周期、大腸菌の化学走性、酵母のフェロモン応答などを取り上げ、生物の持つロバストネスの理論解析を行った。その結果、ロバストネスを実現しているいくつかの原理的構造が特定されるとともに、ロバストネスなシステムを意図的に脆弱にしたりする制御アプローチへと発展した。これらの成果を基盤に、生物学的ロバストネスの理論の研究が発展的に継続している。
生物におけるロバストネス理論
ロボットの商業的成功のためには、技術的基盤が広く普及し多様なアイデアが出されることと、消費者やクライアントに受け入れられるデザインの確立が重要である。しかし、従来これらの課題は、ほとんど注意が払われてこなかった。そこで、工業製品としてのロボットデザインの研究や、簡単なヒューマノイドの技術情報のオープンソース化など、商業化を推進する活動を行った。この結果、ベネチア芸術祭やニューヨーク近代美術館で招待展示されるなど、ロボットデザインという分野が生み出され、認知された。また、公開された技術情報は、多くの企業、研究者、教育機関で活用されている。また、プロジェクトからのスピンアウトのベンチャー企業も2社誕生した。
ロボットデザインとOpenPINO(図3)
音環境の理解、視覚・聴覚・運動の融合処理にもとづく複数音源の分離と複数話者同時発話認識を、自ら移動するロボット上で行う技術を開発した。また、これらの機能を、未知の音響特性を有する部屋で実現する手法の基礎技術を確立した。
ヒューマノイド認知(図4)
音環境の理解、視覚・聴覚・運動の融合処理にもとづく複数音源の分離と複数話者同時発話認識を、自ら移動するロボット上で行う技術を開発した。また、これらの機能を、未知の音響特性を有する部屋で実現する手法の基礎技術を確立した。
小型高性能ヒューマノイドmorphの開発(図5)
ロボットに必要なデバイスや基礎技術の開発を目的に、デバイスメーカー、半導体メーカーなどと共同で、小型ヒューマノイドmorphを開発した。morphは、全身に120以上のセンサーを埋め込むとともに、高性能CPUネットワークを基盤に、全身協調運動を行う二足歩行ヒト型ロボットである。共同開発されたデバイス群は既に市場で販売され、この分野の発展に貢献している。
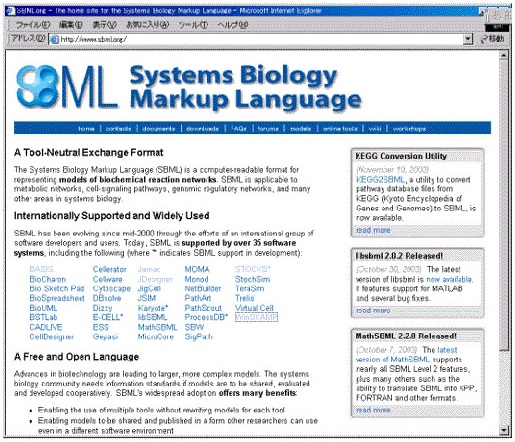
▲図1 Systems Biology Markup Language のウェブサイト
▲図2 線虫の細胞系譜自動生成

▲図3 ヒューマノイドロボット PINO
▲図4 ヒューマノイドロボット SIG

▲図5 ヒューマノイドロボット morph