Progress Report
Development of Unmanned Marine Observation Vehicles to Contribute to Forecasting and Monitoring of Typhoon Artificial Control[1] Development of Virtual Mooring (VM) Technology for Stormy Environments
Progress until FY2024
1. Outline of the project
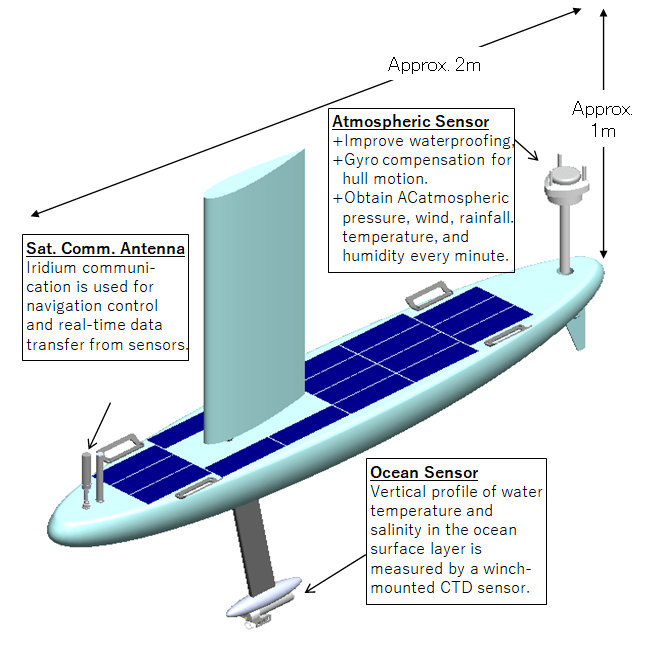
We develop virtual mooring (VM) drone (VMD); sailboat-type uncrewed maritime surface vehicle (USV) that can operate around the center of typhoons and continuously obtain atmosphere-ocean data along their movement based on technologies that enable autonomous navigation and VM driven by winds and ocean currents.
By 2023, we completed to design VM functions and sailboat-type hull, and then conducted tank and coastal sea tests. Finally, we carried open ocean test over the east of the Philippines using the research vessel Mirai . We verified hull control via satellite communication, and offshore navigation. In 2024, we conducted the final open ocean test to assess weather resistance under typhoon-level stormy conditions in western North Pacific/ Bering Sea.
2. Outcome so far
- In the initial fiscal year (2022), we developed VMD prototype #1 based on various test results from the VM drone Prototype 0, including tank tests. Repeated coastal trials led to improvements in hull structure and control software, enhancing navigation performance.
- In the following year (2023), prototype #2 was developed and deployed in a short-term open ocean test over the east of the Philippines during R/V Mirai' tropical Northwest Pacific cruise (June–July), a typhoon generation area. We confirmed hull control via satellite communication, navigation performance, and data transmission. However, due to consistently fair weather during the test period, performance under strong wind and wave conditions could not be assessed.

- In the final fiscal year (2024), prototype #3, featuring an improved weather-resistant design and enhanced navigation performance, was tested during the R/V Mirai western North Pacific/ Bering Sea cruise (October–November) to verify its weather resistance in typhoon-level storm conditions (wind speed > 17 m/s). It demonstrated sufficient hull control and navigation performance, even when tilting sideways up to a rolling angle of 70 degrees.

3. Future plans
One of the future development challenges is ensuring long-term operation in the vicinity of typhoons. To achieve this, open ocean tests based on autonomous return (recovery) from coastal areas like Okinawa are essential. We will continue part of the development through the K Program.