Progress Report
Development of Unmanned Marine Observation Vehicles to Contribute to Forecasting and Monitoring of Typhoon Artificial Control[2] Development of Atmosphere-Ocean Sensors for Stormy Environments
Progress until FY2024
1. Outline of the project
We develop atmosphere-ocean sensors outfitted on virtual mooring drones (VMDs) which provide sufficient accuracy even in stormy environment with large hull motion caused by strong wind and high waves around the center of typhoons and waterproofness enough to withstand temporary submergence and heavy rainfall.
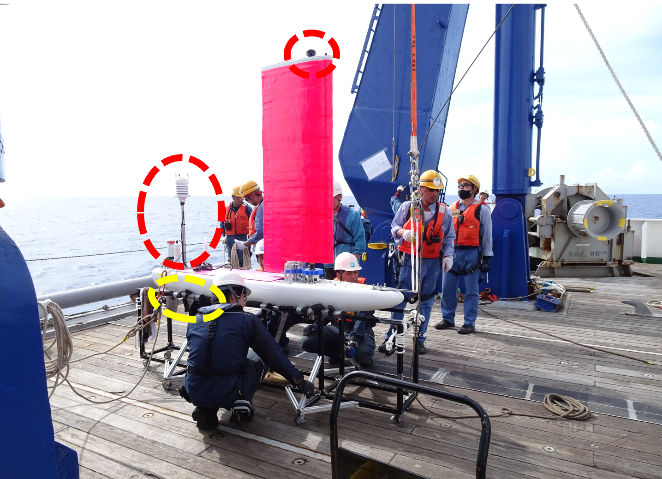
In 2022, atmospheric sensors were waterproofed and then tested in laboratory, water tank, and coastal waters by using VMD prototype #0 and #1. And then, we conducted a short-term open ocean test off the east coast of Philippines during 2023 R/V Mirai tropical ocean cruise to confirm waterproofing and accuracy of sensors installed on prototype #2. In 2024, we conducted the final open ocean test to assess weather resistance under typhoon-level stormy conditions in western North Pacific/Bering Sea in October-November.

2. Outcome so far
- Atmospheric and oceanic observation sensors were installed on VMD prototype #1 for repeated tests in water tank and coastal waters in 2022, leading to improvements in waterproofing and motion correction methods.
- Based on previous test results, upgraded sensors were installed on prototype #2 in 2023 for the first open ocean test east of the Philippines during Mirai' tropical Northwest Pacific cruise (June–July), most typhoon generation area. Despite relatively calm conditions, comparison with Mirai's reference data confirmed sufficiently accurate observations.
- In 2024, further enhanced sensors were installed on prototype #3 to demonstrate weather resistance in typhoon-level stormy conditions (wind speed > 17 m/s). The final open ocean test was conducted during Mirai autumn cruise (October–November) in the western North Pacific/Bering Sea, where extreme stormy conditions were most likely. Even under strong winds and waves causing a rolling angle of up to 70 degrees, the system successfully collected observation data with high accuracy.
3. Future plans
One of the future development challenges is ensuring long-term operation in the vicinity of typhoons. To achieve this, offshore tests based on autonomous return (recovery) from coastal areas like Okinawa are essential. We will continue part of the development through the K Program.