










Homotopic Path Planning on Manifolds for Cabled Mobile Robots
Takeo Igarashi and Mike Stilman
Abstract
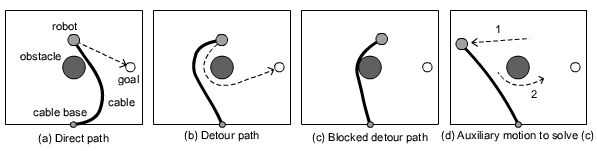
We present two path planning algorithms for mobile robots that are connected by cable to a fixed environment base. Our algorithms efficiently compute the shortest path to the target location considering cable length and obstacle interactions. Both algorithms are analyzed and proven effective on a physical robot system. First, we focus on cable-obstacle collisions and describe an algorithm that operates on the resulting overlapped configuration-space manifold. Next, we present an extension that considers cable-robot collisions. We show that the domain of cabled robotics creates fascinating algorithmic challenges that can be addressed through novel algorithms that effectively solve planning problems in practical domains.

Publication
Takeo Igarashi, Mike Stilman
Homotopic Path Planning on Manifolds for Cabled Mobile Robots
Proceedings of the The Ninth International Workshop
on the Algorithmic Foundations of Robotics
13-15 Dec 2010, Singapore
![]() PDF
YouTube,
PDF
YouTube,