









ケーブルにつながれた移動ロボットの経路計画
五十嵐 健夫、Mike Stilman
概 要
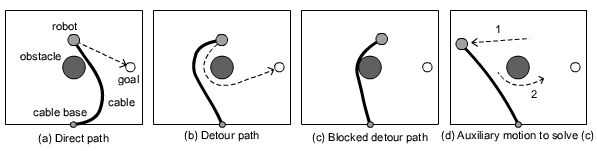
環境に固定されたケーブルに接続されている移動ロボットのための経路計画アルゴリズムを提案する。 我々のアルゴリズムはケーブルの長さと障害物の間の干渉を考慮して、目標地点への最短経路を効率的に計算する。 まず初めに、我々はケーブルと障害物の干渉について考慮したアルゴリズムを提案する。 ここでは、重なりを許した2次元manifold上にconfiguration space を構築し、その上で経路計画を行う。 このアルゴリズムについては、正当性について、詳細な証明を与えた。 次に、我々はケーブルとロボットの衝突を考慮した拡張について提案する。 ここでは、可能性のあるパスの候補についてシミュレーション上で試行、成功したパスを選択する。 こららのアルゴリズムについて実際にロボットを用いて実証を行った。

発表文献
Takeo Igarashi, Mike Stilman,
"Homotopic Path Planning on Manifolds for Cabled Mobile Robots",
Proceedings of the The Ninth International Workshop
on the Algorithmic Foundations of Robotics,
13-15 Dec 2010, Singapore.
![]() YouTube
YouTube
国内発表
五十嵐健夫、Stilman Mike、
「ケーブルにつながれた移動ロボットの経路計画」、
ロボティクス・メカトロニクス講演会2012 (ROBOMEC 2012)、
ポスター、2012年5月27-29日、浜松。