
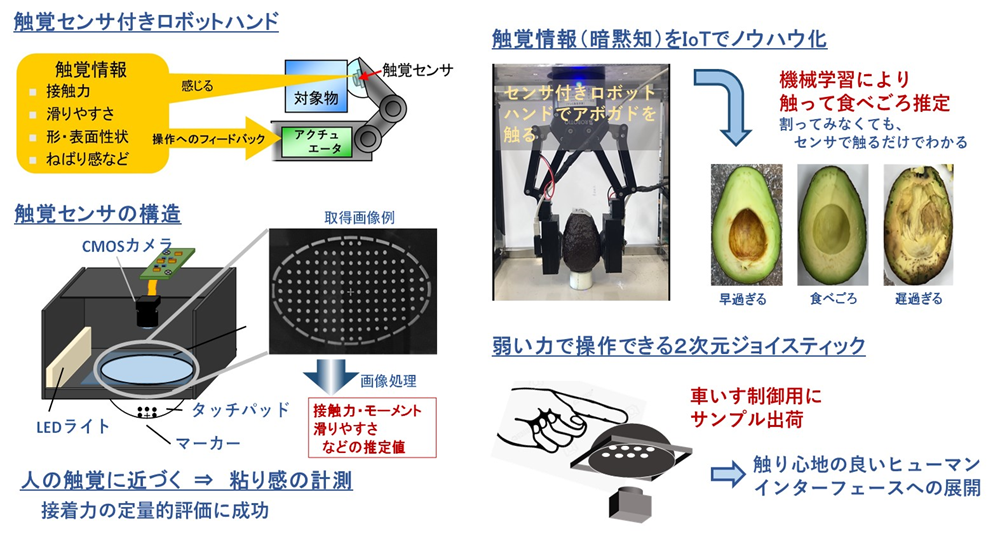
指先は透明で球面をもつ柔らかなシリコンゴムなどでできており、その表面には指紋のような模様がつけられています。
指先のゴム部を内側からデジタルカメラによって撮影して表面の模様の変形を測定し、これから対象物との接触面積、模様の移動量などを画像処理によって算出することで、 指先に作用している力とモーメント、接触面の局所的なすべり、さらには摩擦係数(固着率)まで推定できます。開発したセンサは、一つで人の触覚と同様な情報が取得できるので、人が持っている触覚にかかわるノウハウや感覚評価を代行できます。例として、アボガドの柔らかさと食べごろの関係を学習し、センサで触れば食べごろが推定できることを示しました。また、定量的な評価が難しいねばり感(粘着性)の定量的評価法を確立しました。触覚知のIoT展開へ有効なことを示しました。
小型で高分解能・高速なデジタルカメラとPCの入出力装置の発達普及によって、これを用いる触覚センサの高精度化、高速化、低価格化を進めることができます。デジタルカメラのUSB接続とセンサ用ソフトウェアの整備によって、PCへのプラグインですぐに使えるセンサとするモジュール化を達成しました(Windows、ubuntu)。また、wifiよりも距離の長い高速通信が行える920MHz帯の通信手段でセンサの情報を収集しデータベースに蓄積できることを実証しました。人の触覚に基づく”技”を機械学習などによって獲得しIoTへ展開するために、触覚情報データベースをつくれるシステムが構築できます。)
定量化、言語化が難しい触覚情報に強く関係する“ノウハウや技”は、様々な領域に存在しています。例として、色では成熟度の推定が難しいアボガドの食べごろの推定を触覚センサと機械学習を用いて実施したところ、90%を超える推定精度を得ることができました。また、人が触る必要のあるインタフェースの操作性の改善に適用し、実用に供しました(電動車いすの2次元ジョイスティック)。今まで、触った感覚を定量的に評価する手段のなかった「粘り」の定量的評価法を提案しました。これにより、日用品の肌ざわり、皮膚の評価、操作端のグリップ感、粘着物のハンドリングなどの評価やロボットによる操作に大きな道を拓きました。床擦れや靴擦れによる褥瘡の評価への応用も検討中です。
機関名:中部大学
部署名:工学部 ロボット理工学科 サイバネティクス研究室
研究責任者:教授 大日方 五郎
事業名:地域産学バリュープログラム
研究課題名:IoTへの展開をめざすマルチモーダル触覚センサの開発
支援期間:平成29年10月~平成31年3月
工学部 ロボット理工学科 サイバネティクス研究室
大日方五郎
〒487-8501 春日井市松本町1200
電話: 0568-51-7268 E-mail: obinata(at)isc.chubu.ac.jp