
近年、車椅子利用者と介助者が、ベッドから車椅子、トイレへ簡易に安心して乗り移りができる「移乗機器」の需要が高まっています。
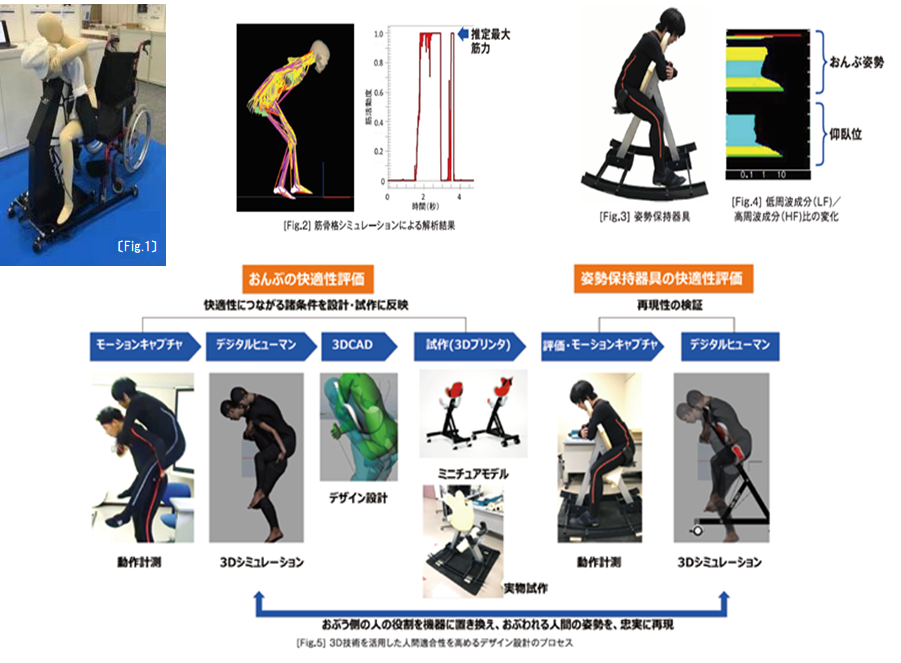
そこで本研究では、人間の自然な抱え上げ動作である「おんぶ」に着目し、低重心位置からのおんぶ動作に基づいた移乗機器[Fig. 1]の研究開発を行なっています。
さらに、人間の自然な動作を機器で再現するために、モーションキャプチャやデジタルヒューマン、3Dプリンタ等のデジタル技術を活用し、人間適合性を効率よく高めるデザインプロセスの構築に取り組んでいます。
はじめに、おんぶの動作解析と快適性評価、胸腹部への圧力計測を行いました。その結果、おんぶ動作時の体幹角度や動作のタイミング、身体を支持する部位など、快適性に関連する諸条件が導き出されました。これらを機器に取り入れることで、おんぶの快適性を、安定して再現することが可能となります。
次に、安定して座位を取れる高さ(45cm以下)からのおぶいあげ動作は、人間にとって困難な動作であることがわかりました。おぶう側の動作を筋骨格シミュレーションで解析[Fig. 2]した結果、被験者が発揮できる筋力以上の筋活動が推定できました。本研究で、人間では再現困難な、安定した座位からのおぶいあげ動作を機器で実現することができます。
さらに、おんぶの前傾姿勢の有用性を検証するため、おんぶ動作を計測したモーションデータをデジタルヒューマンに入力し、3Dシミュレーションを行いながら、おんぶ姿勢を忠実に再現する姿勢保持器具の設計と試作[Fig. 3]を行いました。試作した機器でのおんぶ姿勢と、仰臥位において、自律神経機能のバランス(LF/HF)を計測した結果[Fig. 4] 、おんぶ姿勢は、仰臥位の状態に類似した傾向を示し、副交感神経が優位な状態を保てることが確認できました。
人間と機器との適合性を高めるために、被験者による評価と改良を何度も繰り返すことは、時間とコスト、倫理面からも困難な現状があります。そこで、本研究では、モーションキャプチャを用いて人間の自然な動作を計測し、それらをデジタルヒューマンに入力して、3Dシミュレーションを行いながら、おぶう側の人間の役割を機器に置き換えるデザイン設計のプロセス[Fig. 5]を構築しました。3Dデータを3Dプリンタ出力することで試作を行い、実物試作を使用評価する際に、モーションキャプチャで動作を再計測し、過去の計測データと比較検証することで、試作・評価・改良の流れを迅速に行うことができます。
実用化に向けての課題として、様々な対象者に対する有用性と安全性の検証が必要になります。平成31〜33年にかけて、介護現場においてフィールド・ニーズ調査を行い、様々な被験者に対して評価・検証を繰り返し、機器を改良していきます。平成34年には製品化を目指してコストダウンを図り、市場競争力の高い製品の上市を目標にしています。
さらに、テクノロジーが進んだ次世代に向けて、本研究で蓄積したノウハウを活かして、様々なセンサーを組み込み、セルフメディケーションに役立つ見守りロボット型の移乗機器の開発を目指しています。
機関名:石川県工業試験場
部署名:繊維生活部 デザイン開発室
研究責任者:研究主幹 餘久保 優子
事業名:地域産学バリュープログラム
研究課題名:おんぶ動作特性に基づく快適な移乗機器の開発
支援期間:平成29年10月~平成30年9月
石川県工業試験場 繊維生活部 デザイン開発室
(担当:餘久保) TEL:076-267-8085