研究開発の概要
AIロボットにより拓く新たな生命圏
1.プログラムにおける位置づけ
本研究開発プロジェクトは、『2050年までに、AIとロボットの共進化により、自ら学習・行動し人と共生するロボットを実現』の挑戦対象として、宇宙環境と言う極限条件下において、拠点の構築を目指したものです。本プロジェクトの研究開発は、人的リソースの飛躍的な拡張を目指すものであり、宇宙環境こそが、その真価を問うべき最高の対象となります。特に2019年に世界的協働体制で動き出した国際有人探査プログラム(ARTEMIS) は、これまでの有人宇宙活動からの大きな飛躍を目指しており、多くの挑戦的な技術開発の発展が広く期待されています。
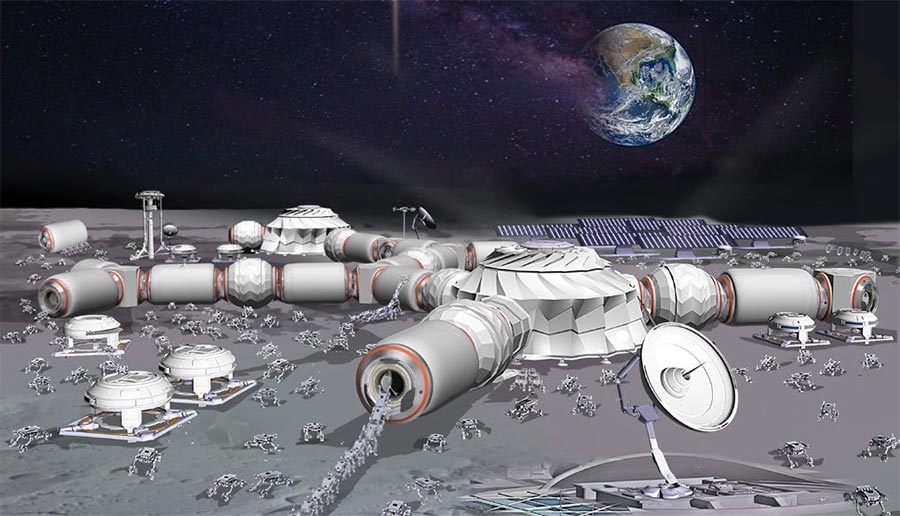
本研究開発プロジェクトでは、現在の宇宙開発分野において十分に検討が進められていない、宇宙での長期的居住を実現する事を将来の目標と定め、その実現に必要な要素をバックキャストし、AIとロボットを活用した研究開発を進める事により、地球外に新たな生命圏を切り拓くことを目指しています。『AI ロボットにより拓く新たな生命圏』による新たな生命圏への挑戦は、人類にとっても大きな飛躍であり、文明そのものに大きな転換点を与えうる切っ掛けとなる事が期待されます。本プロジェクトで実現される宇宙居住拠点は、月面拠点構築の初期段階を実現するのに必須となる有人滞在拠点のベースキャンプとなる技術の実現です。この成果があって、その後の恒久的な月面拠点の構築に向けた活動が初めて可能となります。本研究開発プロジェクトが将来の月面における有人滞在の実現に向けたブレークスルーを与えるものとなることを目指しています。
開発された技術は、地球上の自然災害等にも応用できます。
2.研究開発の概要及び挑戦的な課題
概要
有人宇宙探査の到達点は人類を含む生命体が地球からの従属性を振り切り、月・火星という極限環境において独立した生命圏を築く挑戦です。本プロジェクトは、この到達点をバックキャストした要素をAIロボット技術を発展・活用させながら、スマート技術、行動変容技術等を有した拠点システムの構築に向けた研究開発を行い、2050年には人類が長期的に活動可能な生命圏を実現します。本研究開発プロジェクトでは、2050年に月面拠点を構築可能な技術を確立し、極限領域で人が快適に活動できる拡張型の居住モジュールを構築する。
挑戦的な課題
- 月面という極限環境への可搬性
輸送を含め、限定的な環境、最低限の人的活動により構築、拡大縮小可能なインフレータブル技術や展開構造物 - 未知極限環境において安定性と自在性を有すること
- 持続的活動性
- 未知極限環境で、不整地に対しても安定と自在性を有して設置し持続的活動が可能、かつ拡張性を有する→環境 (温度、地面状態、安定性など) に適応する制御の実現
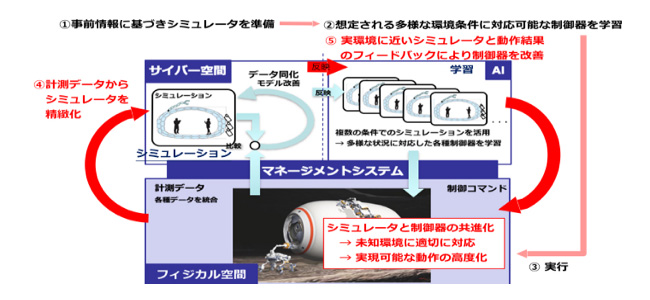
この挑戦的な課題の克服に向けて、以下のようなアプローチで研究開発を行います。
- 知・極限環境領域で機能を発揮できるサイバーフィジカルシステムの構築
- 造物、展開構造物自体のロボット化
- 域で活動可能な小型ロボットの実現と協調動作
- 造体ロボットと小型ロボットの協調による高度な動作
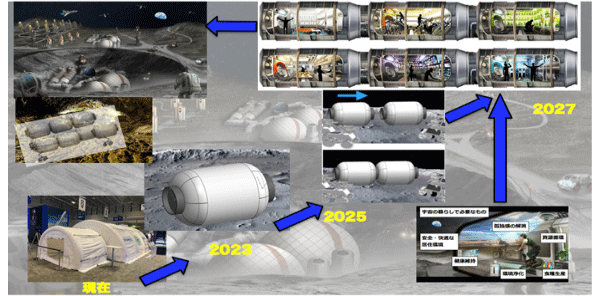
3.今後の展開
2040年に必要となる、月面での拠点構築に必要な居住空間を目指す事で、地上での社会実装へと繋げる事が可能です。月面での初期居住区画の整備に向けた活動を目指しながら、居住モジュールの地上での実証・評価実験や滞在者の快適性を目指した活動も推進します。インフレータブル居住モジュールを快適性も含めた形で構築し、本研究開発プロジェクトの成果を社会に還元しながら、その活動を通じた評価により、より良い居住モジュールへの改善要素を明確化して行く計画です。