プロジェクト紹介

目標3 研究開発プロジェクト(2022年度採択、2023年度終了)人・AI ロボット・生物サイボーグの共進化による新ひらめきの世界JPMJMS223A
プロジェクトマネージャー(PM)森島 圭祐大阪大学 大学院工学研究科 教授
概要
生物は不確かな環境情報しか得られないにも関わらず、環境に応じて巧みに行動します。本プロジェクトでは、そのような生物の「行動ルール」を抽出し、「制御ルール」を設計、適用することによって、生物の巧みさを活かしつつ所望の自己組織化を創発させるAI技術を研究開発します。また、ロボットや生物サイボーグを用いて有効性、有用性を実証します。2050年には、人-ロボット-生物サイボーグの共生によって、人が事故や災害などの不安におびえることなく、精神的により豊かになり、新たな学問・芸術・文化を生み出す社会を実現します。
2030年までのマイルストーン
- 生物サイボーグから見いだした制御ルールの適用による実フィールドでのロボットの自己組織的な協調作業の実現
- 生物サイボーグを用いた自己組織化プラットフォームにより、崩れやすく起伏に富んだ軟弱な地盤に様々な障害物がある難環境でも自己組織的な協調作業を可能とする「制御ルール」を見出し、それをロボットへ適用することで、実際の作業現場に相当する実フィールドでの協調作業を実現します。
2025年までのマイルストーン
- 生物サイボーグから見いだした制御ルールの適用による難環境におけるロボット群の自己組織化と生物サイボーグによる自己組織的な協調作業の達成
- 生物サイボーグをツールとして抽出・設計した、生物の「行動ルール」「制御ルール」を移動ロボットに適用し、難環境での航行性能を向上させ、ロボット群による自己組織的な協調運搬が可能となることを実証します。
研究開発の概要
研究開発テーマ構成
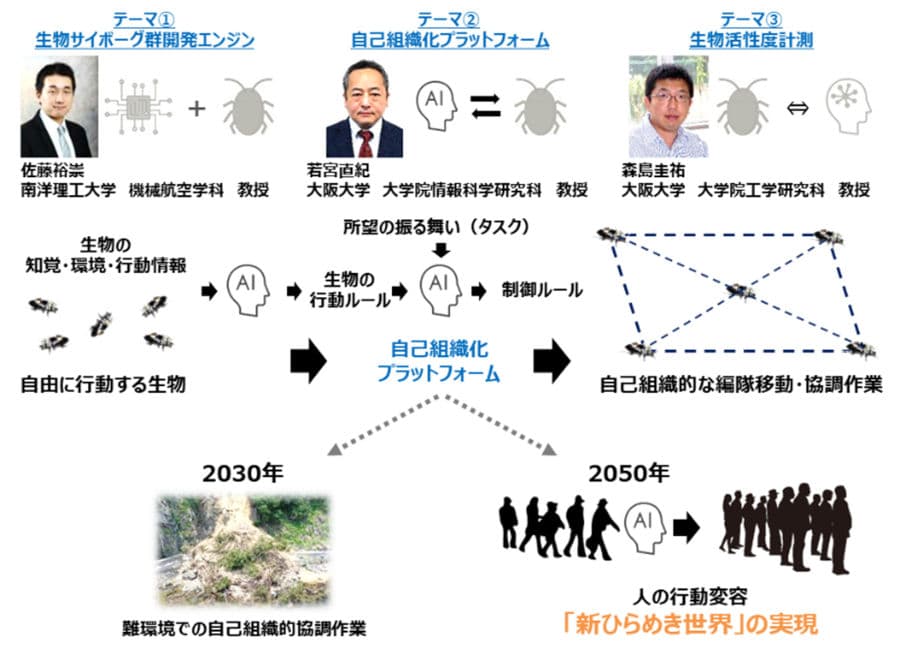
<研究開発テーマ>
- ①生物サイボーグ群開発エンジン
- 超小型センサ、通信機器、行動制御ユニットを搭載した生物(生物サイボーグ)から生物自身の知覚・行動情報や周辺環境情報を抽出するとともに、知覚や行動への働きかけを可能にします。
- ②自己組織化プラットフォーム
- 生物サイボーグをツールとすることにより、生物の生来的な振る舞いを活用しつつ、よりよい振る舞いや自己組織化を創発する制御ルールを設計します。さらにその応用によって、ロボットの行動変容をもたらすAI技術を開発します。
- ③生物活性度計測
- 生物の快・不快度を加味した制御ルールを設計するため、生物の知覚・行動情報から生物の活性度を定量的に計測する方法を見出し、小型デバイスを開発します。
課題推進者
| 佐藤 裕崇 | Nanyang Technological University School of Mechanical & Aerospace Engineering Professor |
|---|---|
| 若宮 直紀 | 大阪大学 大学院情報科学研究科 教授 |
| 森島 圭祐 | 大阪大学 大学院工学研究科 教授 |
代表機関
大阪大学
研究開発機関
大阪大学、南洋理工大学
PDFダウンロード
- 実施状況報告書
- 2022年度版(1.01MB)
- 終了報告書(894KB)