Progress Report
Self-Evolving AI Robot System for Lunar Exploration and Human Outpost Construction[2] Realization of a Lunar Base Using AI Robots
Progress until FY2024
1. Outline of the project
This research focuses on AI-driven deployment and assembly of key lunar infrastructure—solar power towers, communication relays, and inflatable habitation units—starting with the self-assembly of modular robots delivered to the Moon.
Passive components, transported in folded or disassembled form, are assembled cooperatively by multiple robots. For large structures like habitats, active expansion mechanisms such as inflatables are considered.
2. Outcome so far
Using the ground-based prototype of the developed modular lunar robot system, "MoonBot," we conducted verification experiments at the Space Exploration Field, located within the JAXA Space Exploration Test Building. These experiments addressed a set of benchmark tasks essential for constructing a lunar surface outpost. The following three benchmark tasks were undertaken:
Benchmark Task 1: Module Attachment and Detachment
Robots autonomously recognized and executed the attachment and detachment of their own modules or those of other robots. This task evaluated the feasibility of functional adaptation through reconfiguration.
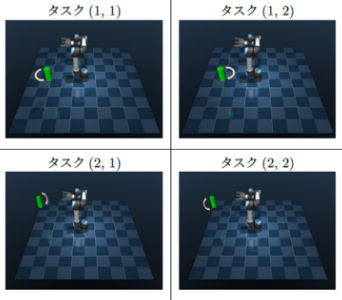
Benchmark Task 2: Structural Assembly
Assuming the construction of infrastructure such as solar power systems and communication relays, robots performed basic assembly actions including insertion and latching. Starting from teleoperation, the system was gradually transitioned toward autonomy through learning of assembly procedures and motion strategies.
Benchmark Task 3: Deployment Support for Inflatable Habitation Units
We verified the active deployment of an inflatable ground prototype of a crewed habitat module (HIDAS). Robots cooperated with the actively expanding structure to perform positioning and connection tasks, demonstrating the feasibility and utility of human-robot collaborative construction on the Moon.

Theme 1: Integrated Control System for Assembling and Construction by Multiple Robots
We advanced research and implementation of integrated control technologies for multi-robot systems in lunar base construction. Starting from human teleoperation, the goal is to achieve autonomous task execution. To this end, we developed simulation-based task planning, digital twins for control strategy derivation, reinforcement learning for autonomous behavior, and Sim2Real techniques for transferring learned policies to physical robots. These efforts have established a foundation for coordinated multi-robot operations in lunar construction scenarios.
Theme 2: Human Outpost Construction Using Inflatable Structures
To realize a sustainable lunar city by 2050, the construction of human-compatible habitats is essential. This research aims to develop the Homeostatic Inflatable Decentralized Autonomous Structure (HIDAS)—an inflatable structure autonomously constructed in cooperation with AI robots.
In FY2024, we implemented deformation and locomotion capabilities for HIDAS and focused on enabling cooperative connection between multiple HIDAS units and robots to expand habitable space. Research also progressed on environmental and inter-unit perception functions to support autonomous collaboration.


Theme 3: Simulations and Machine Learning for Robotic Control of Inflatable Structures
We focused on building a simulation platform and developing control learning methods for roboticized inflatable structures like HIDAS. In FY2024, we constructed a simulation framework equipped with data assimilation functions that adjust model parameters based on physical measurement data, enabling high-fidelity reproduction of HIDAS behaviors. We also validated the feasibility of rotation-based locomotion driven by the expansion and contraction of individual inflatable units and demonstrated that such motion can be achieved through pressure control.
3. Future plans
We will continue advancing the development of highly autonomous robotic systems aimed at enabling AI-supported construction of lunar outposts.