R&D Project

Goal 3 R&D Projects (FY2022 - FY2025)Self-Evolving AI Robot System for Lunar Exploration and Human Outpost ConstructionJPMJMS223B
Project manager (PM)YOSHIDA KazuyaProfessor at Tohoku University
Summary of the project
This project aims to develop a self-evolving AI robot system for lunar exploration and human outpost construction. Core technologies will be established that effectively utilize the components deployed to the Moon, enabling modules to be reconfigured according to lunar conditions and mission tasks. By 2050, exploration and resource utilization on the Moon will be promoted to realize sustainable outposts for human presence in space. In addition, developed technologies can be applicable to the Earth, such as natural disasters, etc.
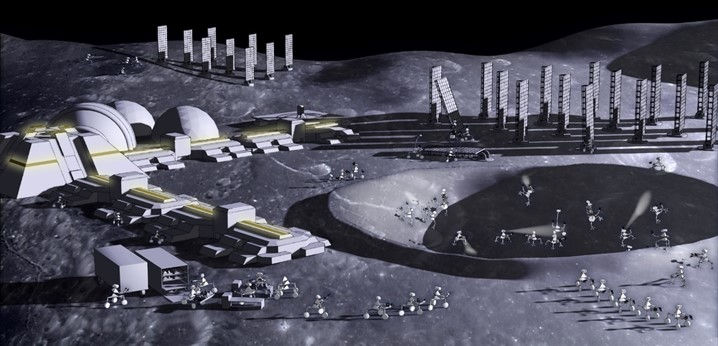
Image of a lunar base with AI robots in 2050
Milestone by year 2030
We develop space flight models of "modular AI robots" that can function under the special environment of the Moon's surface and conduct an initial demonstration mission on the Moon to realize a lunar base using AI robots.
Milestone by year 2025
The robot module can be attached, detached, and replaced by itself or another robot, the module can be reassembled to accomplish the mission by selecting the appropriate movement style and form according to the movement environment, and multiple robots can cooperatively transport large objects on uneven terrain with obstacles, and deploy and assemble structures. The ground-based demonstration will include the ability to cooperatively transport large objects over rough terrain with obstacles and to deploy and assemble structures using multiple robots.
R&D theme progress reports


Performers
| Theme [1] | MATSUNO Fumitoshi | Osaka Institute of Technology |
|---|---|---|
| Theme [1] | MORIMOTO Jun | Kyoto University |
| Theme [4] | YOSHIDA Kazuya | Tohoku University |
| Theme [4] | KIMURA Shinichi | Tokyo University of Science |
| Theme [4] | YAMANOBE Natsuki | National Institute of Advanced Industrial Science and Technology |
PDF Download
- Summary of the project (216KB)