Progress Report
Smart Robot that is Close to One Person for a Lifetime[1] Body and control system for smart robots
Progress until FY2024
1. Outline of the project
Current robot hardware is extremely hard and heavy because it emphasizes its accuracy and durability (rigidity). Therefore, for example, it is not possible to essentially clear safety issues for supporting people in daily life, such as customer service, housework, welfare, nursing, and medical care. To solve the above problem, by making the robot hardware, including its constituent parts, skin, joints, etc., essentially “soft”, while having the power to support the whole body of a person, we design and manufacture a robot body that has arms, mobile mechanism and hands that can use various tools, with passive flexibility that does not harm humans even if it collides. Specifically, we develop dry/wet hybrid smart robots with self-repairing and maintenance functions by circulating bodily fluids such as oils, coolants and lubricants that can coexist with humans, in addition to flexible joints, flexible skin, magnetic fluid actuators, and high-precision tactile sensors.

2. Outcome so far
Sub theme 1: Soft robot hardware that can physically support humans with contact
We conducted various experiments on tasks involving physical contact with humans using the world's highest level human-friendly robot (Dry-AIREC). Furthermore, we conducted the following R&D to realize a new dry/wet hybrid smart robot that resembles the human body.
- - By introducing semantic information based on the concept of the object, the robot can handle unknown object shapes and background environments. By using depth information, we have achieved reliable putting-on socks motions. (Fig.2).
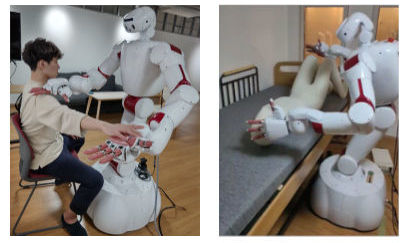
- - We developed hardware for a robot system (upper body) using a rotary fluid actuator with a total of 18 degrees of freedom, and conducted an experiment to lift a heavy object (Fig. 3).
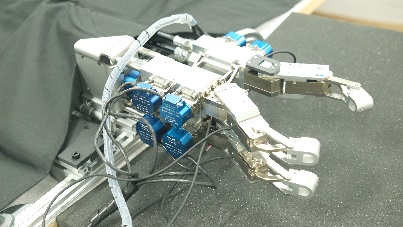
- - We developed a four-fingered fluid-driven robot hand (total of 14 degrees of freedom) and conducted an experiment to crush an empty can(Fig. 4).
- - We developed a technology to polymerize hydrogel skin containing flow channels around a hard structure, achieving liquid circulation within the skin.

Sub theme 2: Robot middleware (OS) for smart robots
By improving the RT System Integration Framework, we have realized grasping operations and health monitoring motions that take into account the handling of multiple objects.
Sub theme 3: Development of a compiler-coordinated low-power-consumption AI processor that realizes the brains of smart robots
Aiming to speed up deep predictive learning processing, we experimentally integrated an embedded GPU into Dry-AIREC, and evaluation results showed that it achieved operation equivalent to that of a high-performance desktop PC.
3. Future plans
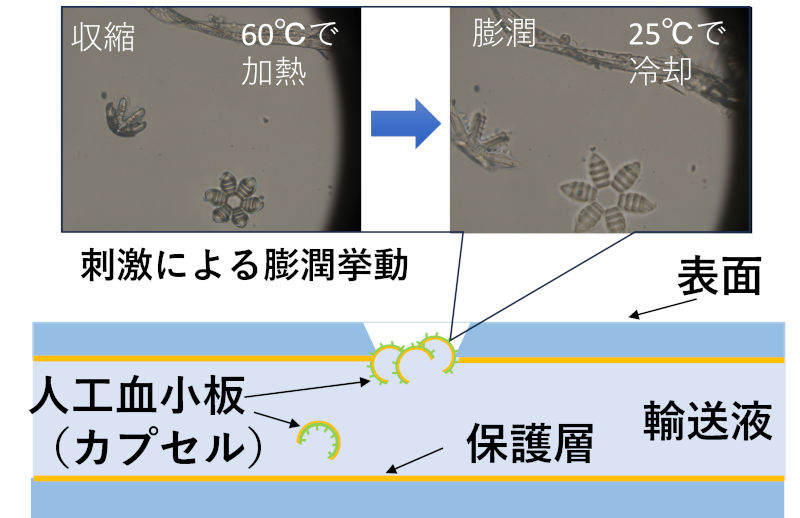
We will continue to implement AI into Dry-AIREC for various application situations involving human contact, develop an upper body system using a rotary fluid actuator, and create a flow path that can absorb capsules with a self-repairing function. Furthermore, we plan to proceed with the integrated development of robot hardware, middleware, and AI chips, including the introduction of a compiler-cooperative low-power AI processor into Dry-AIREC.