- JST トップ
- /
- 戦略的創造研究推進事業
- /
 ACCEL
ACCEL- /
- 研究開発課題/
- 終了課題/
- 触原色に立脚した身体性メディア技術の基盤構築と応用展開
触原色に立脚した身体性メディア技術の基盤構築と応用展開
研究開発課題の概要

|

|
| パンフレットPDF |
研究紹介動画 (約1分30秒) |
研究代表者

舘 暲
(東京大学 名誉教授)
1973年 東京大学大学院博士課程修了(工学博士)
1973年 東京大学工学部 助手
1975年 通商産業省機械技術研究所(1990年まで)
1979年 マサチューセッツ工科大学(MIT)客員科学者(1980年まで)
1989年 東京大学先端科学研究センター 助教授
1992年 東京大学先端科学研究センター 教授(2009年まで)
1994年 東京大学工学部 教授(2009年まで)
2001年 東京大学大学院情報理工学系研究科 教授(2009年まで)
2009年 東京大学 名誉教授
2009年 慶應義塾大学大学院メディアデザイン研究科 教授(2015年まで)
プログラムマネージャー

野村 淳二
(科学技術振興機構 ACCELプログラムマネージャー)
1971年 京都大学 工学部 卒業
1971年 松下電工株式会社 入社
1988年 工学博士 取得
1997年 システム開発センター 所長
2009年 パナソニック株式会社 常務取締役
2010年 パナソニック株式会社 代表取締役 専務
2011年 パナソニック株式会社 顧問
2014年 IEC(国際電気標準会議) 会長
2014年 ACCELプログラムマネージャー
研究開発概要
CRESTでは、触原色原理注1)に基づく触覚伝送手法を開発し、触覚と3D映像が融合した3次元視触覚情報提示装置注2)や触感を伝えるテレイグジスタンス注3)ロボットなどの実証システムを通じて、その有用性を示し触感伝送の基盤技術を構築しました。
ACCELでは、触原色原理に基づき小型・一体型の触覚伝送モジュールを開発し産業界や一般のユーザーに広く提供することで、触覚を持つ身体的経験の記録、伝送、再生に基づく製品やサービスの早期創出を推進します。放送分野やエンターテインメント分野での実用化を志向した「身体性コンテンツプラットフォーム」、およびロボットを用いた遠隔就労という新しい産業の可能性を示す「身体性テレイグジスタンスプラットフォーム」の2つの実証システムを構築し、社会的・経済的インパクトを与えるイノベーションの実現を目指します。
注1)触原色原理
人の触知覚メカニズムに基づき、触覚を視覚の3原色と同様に、圧力・振動・温度など複数の感覚要素の統合として捉えることで、触覚の計測・伝送・提示を可能とする技術。
注2)3次元視触覚情報提示装置
手で直接触れ、操り、触感を感じることができるような3D映像を空中に提示し、バーチャルな世界を現実世界と同様に「見たものを見たままにさわれる」ようにする技術。
注3)テレイグジスタンス
人の分身となるロボットを遠隔地に配置し人の身体運動をロボットに同期すると同時に、分身ロボットが得た視覚・聴覚・触覚を人に伝えることで、まるで人自身がロボットと一体となり遠隔地に訪れたかのような体験を提供する技術。
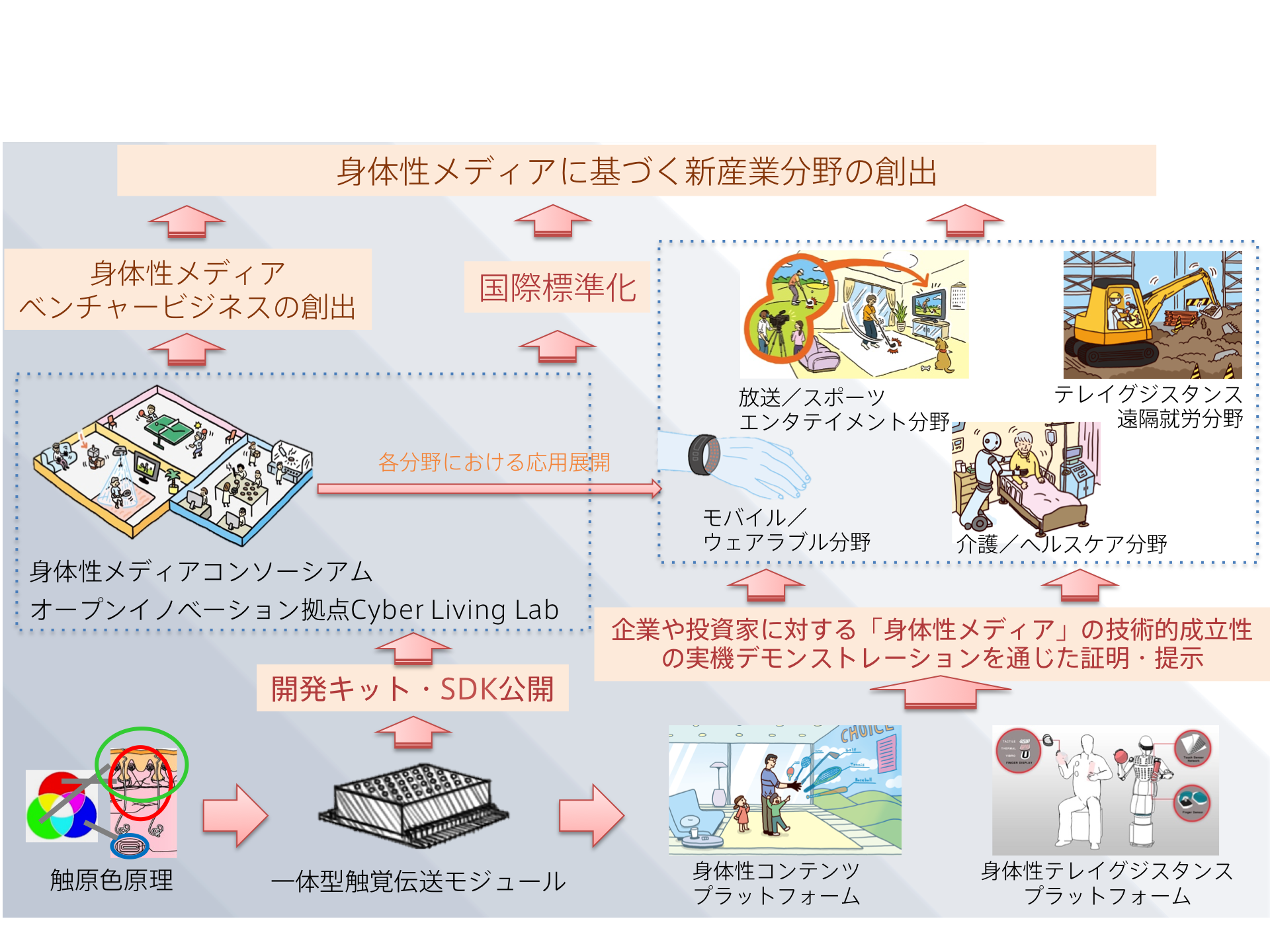
<目指すビジョンの図>