OUTLINE
- Outline
- Autonomous Robots Research Group
(Osaka University) - Verbal Conversation Research Group
(Kyoto University) - Experimental Research Group (ATR)
Outline

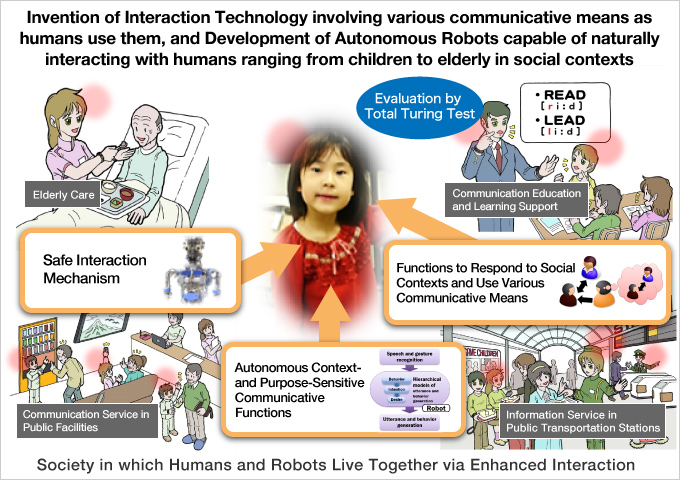
The focus of robotics research is shifting from industrial robots to robots working in daily situations. The kind of entity with which humans most easily interact is humans. Then, it is important to develop humanoid robots with abilities to interact with humans, and such abilities involve multiple types of senses, language use, and complex body movements. This research area engages in the development of Symbiotic Human-Robot Interaction, and its goal is to develop autonomous social robots that can communicate with multiple humans via various communicative means as humans use them. The relevant means include body and hand movements, facial expressions, gaze, body contact, etc. In order to achieve the goal of developing autonomous robots capable of companionably interacting with and living together with humans, it is necessary to develop certain devices and technologies: (a) surface skin material and internal structure for safe interaction with humans, (b) stable and flexible speech recognition technology, (c) functions of autonomous context- and task-sensitive communication on the basis of a hierarchical model consisting of desire, intention, and behavior including speech act, and (d) functions of using multiple communicative means to communicate with multiple persons in social contexts.
The research area has two sub-goals: (1) to test and confirm the humanlikeness of robots (i.e., the extent to which robots feel like humans) by comparing them with teleoperated robots and more directly with humans (Total Turing Test), and (2) to offer robots as care support tools for elderly people and people with developmental disabilities. Communication support is equally important as physical support in elderly care.
The research area aims at providing communication support for the elderly and education and rehabilitation for the developmentally disabled. More widely, it also aims at providing communication education and learning support for people in general and information and communication service in public facilities. The research area will ultimately offer newly developed robots as a new test bed for understanding what human is. It is expected that these robots and their interaction with humans in the actual situations will deepen the understanding of important topics in cognitive science and neuroscience: for example, self- and other-recognition, consciousness, and mind.
Autonomous Robots Research Group (Osaka University)

Development of hardware and software for research robots based on the Geminoid, Telenoid, and Synchy, and study of how to pass the total Turing test, in collaboration with the vocal conversation research group
Verbal Conversation Research Group (Kyoto University)

Development of speech recognition and generation technologies for natural conversation, and study of how to pass the total Turing test, in collaboration with the autonomous robots research group
Experimental Research Group (ATR)

Development of hardware and software for the practical use of robots based on the Geminoid, Telenoid, and Synchy, and experiments for their actual use, in collaboration with other cooperated institutes in Japan and Denmark




