


人の歩行リズムに合わせた支援ロボットと歩行分析で歩行を改善
企業等名WALK-MATE LAB株式会社
◆ 中核機関名
東京工業大学(ビジョン2)
企業等の概要
◆ 代表者名
代表取締役 菊池功
◆ 所在地
東京都八王子市美山町2161-21
◆ 設立
2015年8月
◆ 資本金
3,000万円
◆ 社員数
7人
主力製品・サービスの概要
◆ 主力製品・サービス名
①Walk-Mate Robot、②Walk-Mate Viewer
◆ 発売時期
2020年8月
◆ 主力製品・サービスの概要
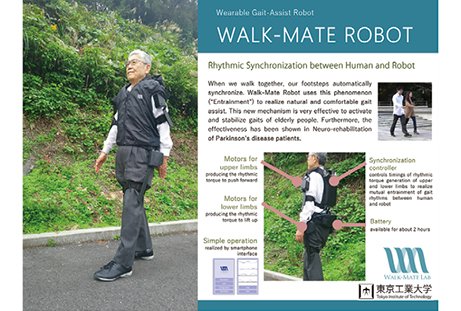
①ロボットとのリズム同調による「間(ま)」の合う歩行アシストです。身に着けるタイプのロボットで、装着者の手足を振り出しするタイミングにロボットが同調してアシストします。
②ウェアラブルな高感度センサを用いた歩行計測&分析システムです。無線小型センサを両足と腰に装着して歩くと、歩いている際のセンサの計測値から軌道を算出することで歩行を解析します。
売上高:5,000万円(2020年度)
◆ 主力製品・サービスの特徴
①2分程度で簡単に装着でき、操作もスマートフォンから簡単にできます。バッテリー式で約2時間使用可能です。
②IMUセンサを固定しタブレットのアプリをタップするだけで、モーションキャプチャと同水準の計測ができます。また、計測結果はアプリ内で作成したアカウント毎に記録でき、リハビリテーションやトレーニングの長期的な効果も観察可能です。
◆ ターゲットユーザー
歩行に困難がありリハビリを行う方(主としてパーキンソン病、脳卒中、骨折等)、健康維持のために歩行運動を行う方

◆ 市場規模
歩行に困難がありリハビリを行う方:国内に約500万人
健康維持のために歩行運動を行う方:国内に約3,000万人
◆ 関連サイト等
-
COIプログラムの寄与
◆ 技術面での貢献
- ●①患者の歩行リズムとロボットのリズムを同調させて間を合わせるタイミング制御モデル
- ●②IMUセンサーのデータをもとにした足や腰の軌道推定
:三宅美博(東京工業大学)
◆ その他の貢献等
- ●拠点関係者が役員に就任:
三宅美博(東京工業大学 教授) - ●特許料が拠点へ還元
◆ 知財・論文・発表等の成果
- ●Kishi, T., Ogata, T., Ora, H., Shigeyama, R., Nakayama, M., Seki, M., Orimo, S., Miyake, Y., "Synchronized tactile stimulation on upper limbs using a wearable robot for gait assistance in patients with Parkinson’s disease," Frontiers in Robotics and AI, vol.7, no.00010 (2020)
社会経済的な効果
◆ 人や社会への影響
歩行という基本的な動作に関する障害を改善することで、生活の質の向上に貢献しています。
◆ 関連するSDGs・社会課題

高齢社会
難病