









Snappy: 写真を用いたロボットへの物体配置の指示手法
橋本 直,Andrei Ostanin,稲見 昌彦,五十嵐 健夫
概 要
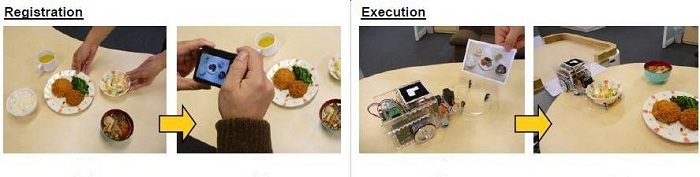
我々が日常的に慣れ親しんでいる「写真」というメディアを,人間がロボットに対して物体配置の指示を行うためのフロントエンドとして用いる手法「Snappy」を提案する.Snappyでは,ユーザはカメラを使って対象物を撮影することにより,その物体の配置情報(どこに何を置くか)を登録することができる.そして,その写真をロボットに提示することによって,写真に写っているものと同じ配置でロボットに物体を並べさせることができる.本研究では,ロボットが食器の配膳を行うシステムを実験的に構築し,その中でロボットに対して配膳の指示を行う手法として提案手法を実装し,その有効性について検証を行った.
発表文献
Sunao Hashimoto, Andrei Ostanin, Masahiko Inami, Takeo Igarashi,
Photograph-Based Interaction for Teaching Object Delivery Tasks to Robots,
5th ACM/IEEE International Conference on Human-Robot Interaction (HRI2010), Late-Breaking Report, pp.153-154, Mar. 2010.
![]()
国内発表
- 橋本直, Andrei Ostanin, 稲見昌彦, 五十嵐健夫,
「Snappy: 写真を用いたロボットへの物体運搬ロボットへの指示方法」、
ロボティクス・メカトロニクス講演会2012 (ROBOMEC 2012)、ポスター、2012年5月27-29日、浜松。 - 橋本直, Andrei Ostanin, 稲見昌彦, 五十嵐健夫,
「Snappy: 写真を用いたロボットへの物体配置の指示方法」、
第18回インタラクティブシステムとソフトウェアに関するワークショップ (WISS 2010), 2010年12月2日.