






リードを用いた移動ロボットの操作インタフェース
James Everett Young, Youichi Kamiyama, Juliane Reichenbach, Takeo Igarashi, Ehud Sharlin

概 要
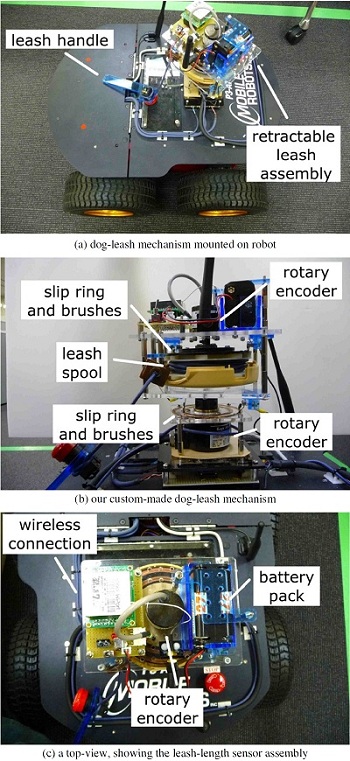
重いスーツケースを運ぶロボットポーターや食料品を運ぶロボットなど、 日常生活において人間について歩くロボットのための指示方法として、 紐(リード)を利用したインタフェースを提案している。 これは、犬の散歩に使われるリードを、使ってユーザからロボットへの指示を出 すというものである。本研究では、このような基本的なアイデア に基づくさまざまなインタラクション手法を実装し、 これらがどのようにユーザから受け入れらるかなどについて実証実験を行った。
発表文献
James Everett Young, Youichi Kamiyama, Juliane Reichenbach, Takeo Igarashi, Ehud Sharlin.
How to Walk a Robot: A Dog-Leash Human-Robot Interface.
20th IEEE International Symposium on Robot and Human Interactive Communication (Ro-Man 2011), pp.376-382, August, Atlanta. Video: YouTube(1:43)
Video: YouTube(1:43)
How to Walk a Robot: A Dog-Leash Human-Robot Interface.
20th IEEE International Symposium on Robot and Human Interactive Communication (Ro-Man 2011), pp.376-382, August, Atlanta.
ビデオ
写 真