

國府チーム
メンバー
| 國府寛司 | (京都大学大学院理学研究科) Team Leader |
| 青柳富誌生 | (京都大学大学院情報学研究科) |
| 青井伸也 | (京都大学大学院工学研究科) |
研究概要
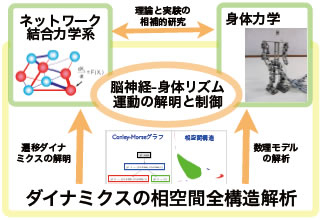
ダイナミクス全構造計算法の発展による脳神経-身体リズム機構の解明と制御本研究は、ヒトや動物が動的に変動する環境に適応して活動する基礎となる脳神経系と身体系のリズム制御機構を理解するために、ダイナミクス全構造計算法などの数理的方法を用いて神経系の数理モデルのアトラクタの多様性や引き込み領域を解析することで高度な機能発現のメカニズムを解明し、数理的解析と実機モデルでの実験を通して、リズム調整や歩容遷移などの歩行制御機構の研究から工学的な技術や応用につなげることを目指します。