
Locomotion of Musculoskeletal Infant Robot

Fig.1 Musculoskeletal infant robot “Pneuborn-7II”
An infant robot “Pneuborn-7II”, which has compact body as a 7 month-old infant and humanlike musculoskeletal system including spinal joint, has been developed in order to investigate a role of the flexible musculoskeletal body in the developmental process of locomotion such as crawling [narioka2009].This robot is driven by pneumatic artificial muscles so that it can generate flexible and dynamic behavior.

Fig.2 CPGs network and phase biases
It is well known that human locomotion such as walking and running is generated based on a control of both rhythm and tonus of muscles. In case of an infant’s developmental process, it also seems to be important to think both rhythmic and tonic control to find a well coordinated motion. From this point of view, we proposed a way for of development of crawling with CPGs, and verified experimentally using the infant robot. In the experiments, seven oscillators are set on each joint (shoulders, hips, knees, and spine) as shown in Fig.2. The phase biases of neighbor oscillators are set to be control parameters. We optimized phase biases of shoulder-spine, and hip-spine so that the velocity of the infant get faster. We used Powell’s method for the optimization since it is gradient free method and available for the online learning in the real world. In the first experiment, We found that the crawling motion of the robot was acquired after learning phase with proposed method.

{kind=link}
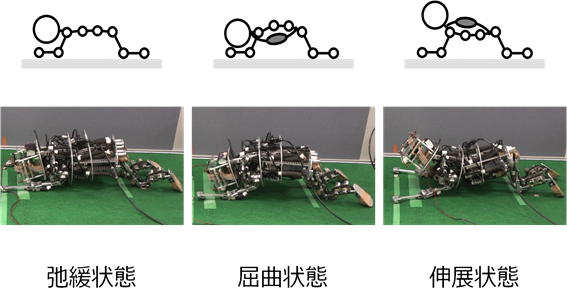
Fig.3 Three spinal conditions
Then, we have investigated the role of spinal posture and tonus for the locomotion. We conduced a similar learning experiment with three spinal conditions as shown in Fig.3; relax, flex, and extend. The velocities of the robot while learning with these conditions are shown in Fig.4. The robot tend to move backward when the spine is flexed. The velocity of the robot with relaxed spine is slower than that with extended spine. Phase biases of shoulder-spine and hip-spine and forward velocity while learning are shown in Fig.5.

Fig.4 Change of the velocity while learning

Fig.5 Phase bias of shoulder-spine(horizontal axis) and hip-spine(vertical axis) and forward velocity(color)
The infant robot has flexible body structure, so that it is difficult to describe the interaction with its environment by mathematical model. Then, our infant robot is useful plat form to see the essence of development through the interaction with the real world. It is also important that the pneumatic actuator can keep working for a very long time without any heat troubles, while we have to consider overheat problem if we use electric motors.