事業成果
生命科学分野の研究を加速
人間とロボット・AIの協働でiPS細胞を培養2023年度更新

- 高橋 恒一(理化学研究所 生命機能科学研究センター チームリーダー)
- 未来社会創造事業
- 探索加速型「共通基盤」領域「ロボティックバイオロジーによる生命科学の加速」 研究開発代表者
(探索:2018-2020、本格:2021-2025)
iPS細胞から目の網膜の細胞をつくる技術を自動化
本研究グループは、iPS細胞の培養に最適な条件検討を自律的に試行錯誤するロボット・AIシステムを開発し、実際の再生医療で使われる細胞培養のレシピ(作り方)改善に成功した。
高精度な生命科学実験の動作に対応する汎用ヒト型ロボットLabDroid「まほろ※1」(図1)と新たに開発した人工知能(AI)ソフトウェア(最適化アルゴリズム)を組み合わせたシステムを設計し、このシステムがiPS細胞(人工多能性幹細胞)※2から網膜色素上皮細胞(RPE細胞)※3への分化(複雑化し異質化すること)を誘導する工程において、効率的な培養条件を人間の介在なしに自律的に発見できることを実証した。
※1 汎用ヒト型ロボットLabDroid「まほろ」
ロボティック・バイオロジー・インスティテュート株式会社(株式会社安川電機の子会社)により開発された生命科学実験用のヒューマノイドロボットシステム。株式会社安川電機の産業用7軸双腕ロボットの周辺に、人間が実験で用いるものと同じ実験器具を配置している。ピペット操作(一定体積の液体あるいは気体を正確に分取し、これをほかの容器に移し取る比較的、簡単なガラス器具の総称)やインキュベーター(温度を一定に保つ機能を有する装置)の扉の開け閉めなど、人間が手で行っていた実験操作がロボットでも実行可能になった。
※2 iPS細胞(人工多能性幹細胞)
成人の皮膚細胞などの体細胞にOct3、Sox2、Klf4遺伝子などを導入して初期化し多能性を持たせ、人工的に作製した多能性幹細胞(体を構成する、すべての組織細胞や生殖細胞に分化できる、未分化な幹細胞)。
※3 網膜色素上皮細胞(RPE細胞)
網膜を構成する細胞の1つ。理化学研究所や神戸市立神戸アイセンター病院などにより、iPS細胞由来RPE(retinal pigmentepithelium)細胞を用いた再生医療の臨床研究が行われている。
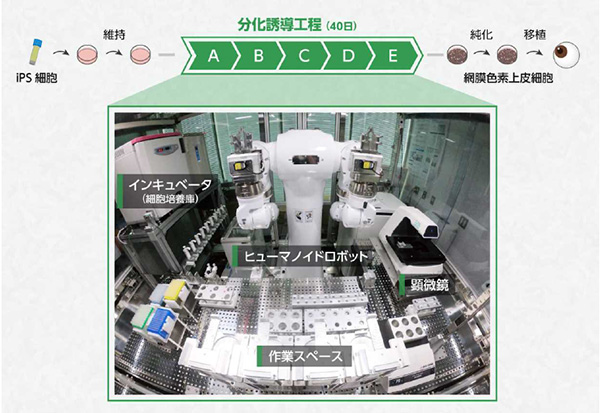
図1 LabDroid「まほろ」
iPS細胞からRPE細胞への分化誘導工程を実装。
細胞を扱う実験特有の技術課題
人類の英知を広げる営み、科学。科学の研究活動は、数多くの実験によって成り立ち、個々の実験は多くの条件検討と数回の本番実験で構成される。このうち条件検討は、実験が成立するための細かいパラメータ(反応時間・試薬濃度・操作順序など)を探索する工程であり、膨大な試行錯誤を要する。現在、研究者たちの試行錯誤の負担を軽減する取り組みとして、科学実験を人間の介在なしに自律的に実行する自律実験が、さまざまな分野で進められている。
「燃料電池に用いる光触媒混合物の組成比」「微生物による物質生産を対象とする、生産効率を向上させる微生物の遺伝子配列」など、いくつかの分野では自律実験の成功事例も出てきている。しかし、iPS細胞の分化誘導に代表される再生医療分野や細胞生物学分野での実施例はこれまでなく、細胞培養では、実験における微細な操作の違いが品質に大きな影響を与えることや、分化誘導には長時間(数週間〜数カ月)の培養が必要であることなど、2つの技術的な障壁があった。
細胞培養分野における自律実験の実証
本研究は、【ステップ1/プロトコルのロボット実装】→【ステップ2/自律実験戦略の決定】→【ステップ3/実証実験】 の3つのステップで、細胞培養分野における自律実験の実証に取り組んだ。
【ステップ1/プロトコルのロボット実装】
iPS細胞から分化誘導したRPE細胞を患者に移植するまでの全工程のうち、iPS 細胞からRPE細胞への分化誘導工程をA~Eの5つに分解し、それぞれの工程に必要な手順を汎用ヒト型ロボットLabDroid「まほろ」に実装した。まほろは、1回の実験につき8枚の6ウェル(穴)プレートを扱い、合計48個のウェルでの細胞培養を同時に実行できるように設計した。実際に培養を行った結果、48個のウェルのすべてで、分化したRPE細胞を示す着色細胞(分化前のiPS細胞は無色、分化後のRPE細胞は茶色)が出現したことから、必要なプロトコルをロボットに正常に実装できたことがわかった。
分化誘導の効率を着色した細胞の割合で評価すると、ウェル内における着色細胞の割合は4〜5割程度であったことから、分化誘導効率は不十分であり、さらなる向上が求められた(図2)。ステップ1での培養条件と動作は、一般的な人間の手作業と同条件(標準条件)であり、そもそもロボットと人間では、最適な条件が異なることが示唆された。そのため、自律実験によりロボットが培養する際の分化誘導効率の向上に取り組んだ。
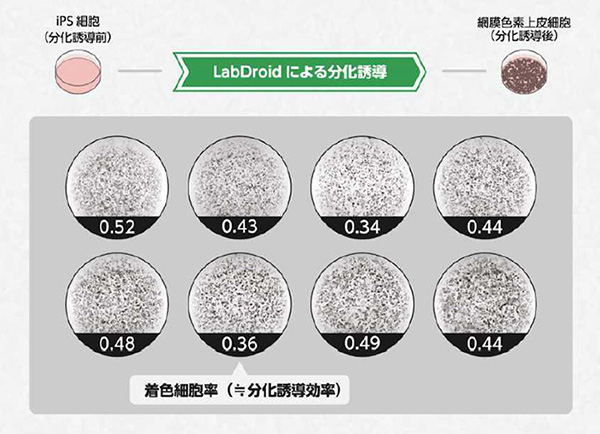
図2 LabDroid「まほろ」が分化誘導したRPE細胞の分化誘導効率(着色状態)
一般的な人間の手作業と同じ条件(標準条件)で、LabDroid「まほろ」が分化誘導を行った結果。黒い部分は正しく分化誘導されたと考えられるRPE細胞、白い部分はそれ以外。すべての条件で4〜5割程度の着色が観察された。
【ステップ2/自律実験戦略の決定】
iPS細胞からRPE細胞への分化誘導工程には、試薬の濃度や処理時間細胞を取り扱う際の強度など、適切に設定すべき数値(パラメータ)が存在する。本研究では、分化誘導効率を向上させるパラメータの組み合わせを導出するための戦略をブラックボックス最適化問題※4として定式化(モデル化)し、具体的な手法を選択した。ブラックボックス最適化問題を解決するアルゴリズムとして、よく用いられるベイズ最適化※5を、自律実験のための最適化手法として利用した。ただし、一般的なベイズ最適化は、実験→評価→計画を1条件ずつ多数ラウンド繰り返すもので、iPS細胞からRPE細胞への分化誘導工程にあてはめると、1ラウンド当たり40日間の培養を要するため、ベイズ最適化の拡張手法であるバッチベイズ最適化※5を採用した。バッチベイズ最適化は、1ラウンド当たりの条件を複数条件化するため実験期間を短縮できるもので、本研究では、最終的に48条件の実験→48条件の評価→48条件の計画を3ラウンド繰り返して行った。
バッチベイズ最適化を適用するために必要となる、変化させるパラメータ(探索範囲)と、最大化させたい値(評価値)を定めた。専門家の助言と計算機によるシミュレーションを参考にして、iPS細胞からRPE細胞への分化誘導工程のうち7つをパラメータと定めた(図3)。また評価値は、分化導効率として着色細胞率を用いた。以上に基づき、戦略を実行可能な人工知能(AI)ソフトウェア(最適化アルゴリズム)を開発し、実証実験を行った(図4)。
※4 ブラックボックス最適化問題
細胞培養は、細胞の内部状態が複雑であるため、どのパラメータをどう変化させる(入力)と分化誘導効率が向上するか(出力)、を直感的に導き出すことは困難である。このように入力と出力の関係性が不明な状況を「ブラックボックス」と呼び、ブラックボックスの出力を最大化/最小化する入力を、試行錯誤を通じて発見する問題をブラックボックス最適化問題と呼ぶ。
※5 ベイズ最適化、バッチベイズ最適化
ベイズ最適化はこれまでの実験結果を基に、良いと予測される条件(活用)とまだ実験していない未知の条件(探索)をバランス良く選ぶアルゴリズム。形状が不明な関数(ブラックボックス関数)の最大値や最小値を求めるために用いられる。

図3 探索範囲のパラメータ
【ステップ3/実証実験】
研究グループは、バッジベイズ最適化で導いた48条件をLabDroid「まほろ」によって実際に実験し、それぞれの分化誘導効率(着色細胞率)を評価した。最適化アルゴリズムを用いながら、ラウンド3まで実験計画・実験実行・評価・予測を繰り返し、最適なパラメータを探索した(図4)。実験の結果、ラウンド3において最も高い評価値の獲得に成功した(図5)。さらに最終評価試験を行い、最適化アルゴリズムによる探索前の条件に対して、統計学的に有意に評価値が向上していることを確認した。
これらの結果から、汎用ヒト型ロボットLabDroid「まほろ」と最適化アルゴリズムを組み合わせたシステムにより、iPS細胞からRPE細胞への分化誘導効率を高める培養条件を人間の介在なしに自律的に発見する、細胞培養分野における自律実験が可能であることが示された。
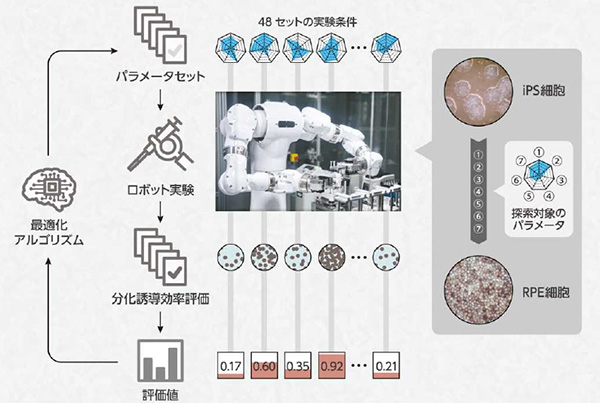
図4 自律実験戦略とワークフロー
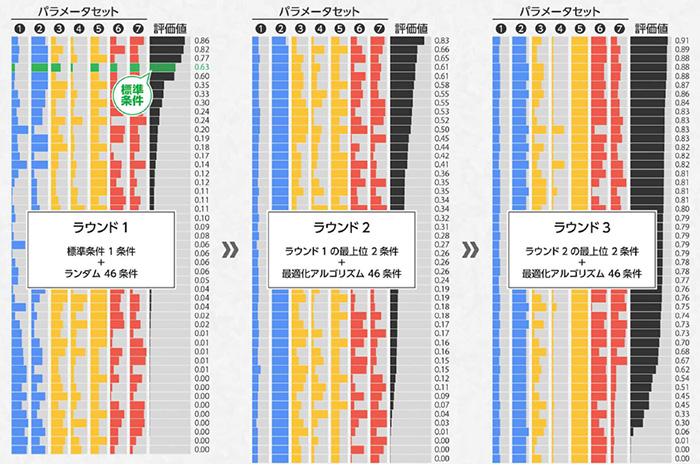
図5 実証実験の結果
ラウンド1〜3におけるパラメータセット(実験条件)と評価値(着色細胞率)。ラウンド1の緑色は標準条件を示す。ラウンド3において最も高い評価値(91%)を獲得した。
生命科学研究の加速に貢献
本研究は細胞培養分野での取り組みであるが、LabDroid「まほろ」とAIシステムを組み合わせることで、幅広い分野に応用できることが期待されている。多くの生命科学実験における試行錯誤を自律的に遂行することが一般的になれば、生命科学研究の進展が大いに加速すると考えられている。
また、生命科学実験の自動化は、人とロボット・AIの新たなパートナーシップを切り拓く。本研究のシステムでは、専門知識を持つ人間が対象工程・探索範囲・評価値の定義を、ロボット・AIが実験の試行錯誤を担うという役割分担が行われている。この役割分担により、研究者は知的創造に専念できるようになる。
- ライフサイエンスの成果一覧へ
- 事業成果Topへ
- English